
Processing: 20220420_153455.mp4…
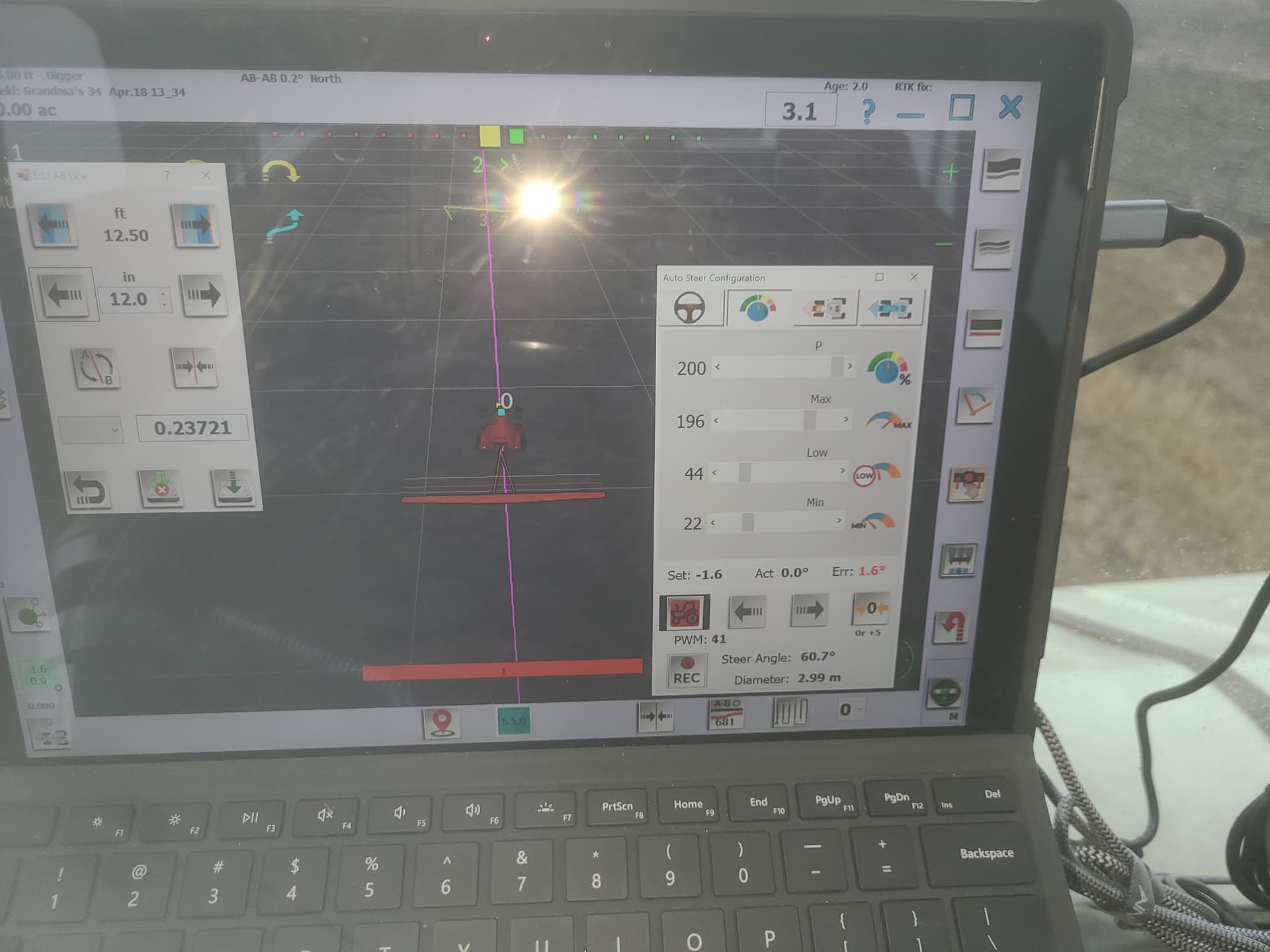
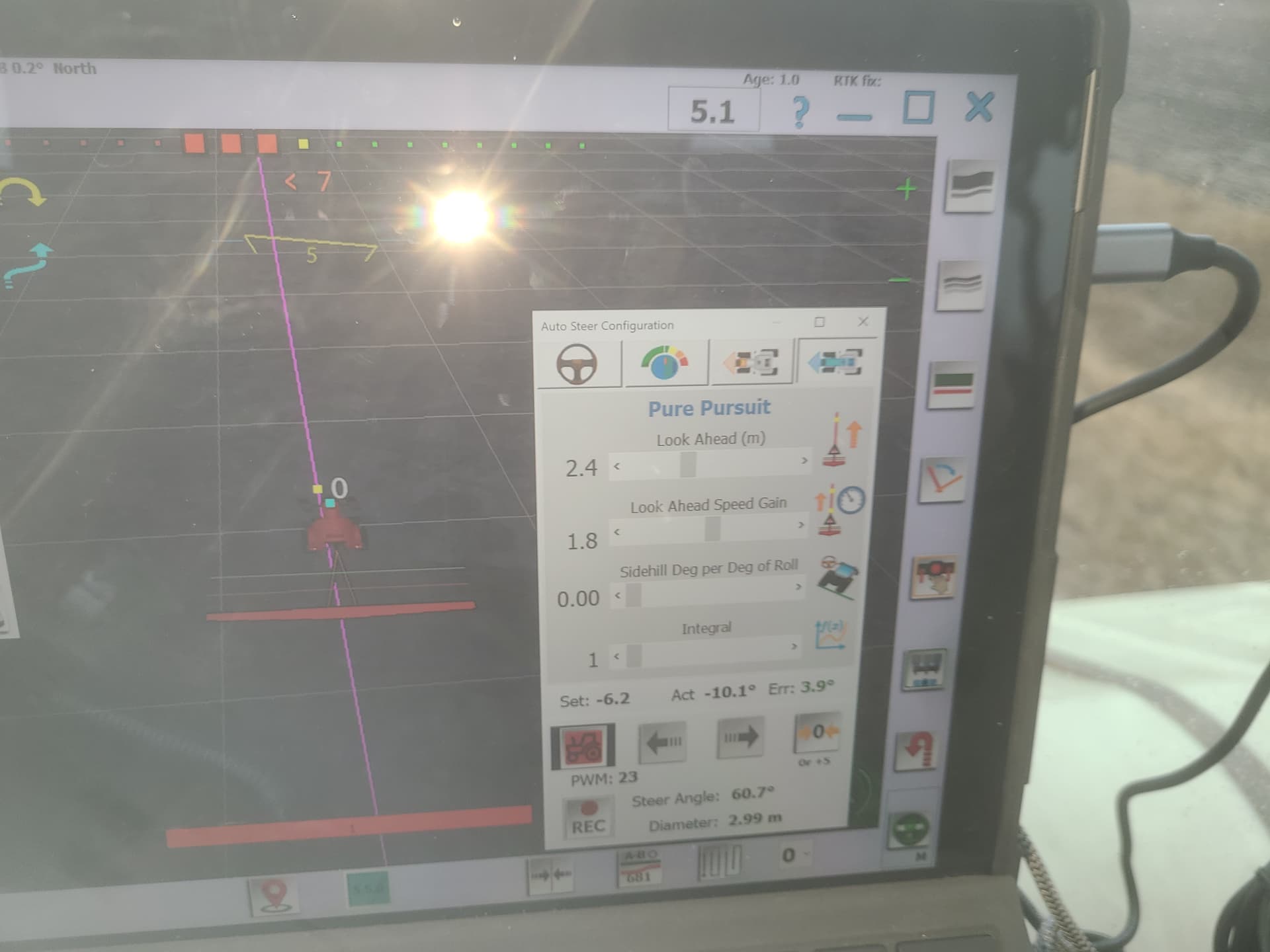
Anybody have any thoughts on steer motor settings. I’m using a current sensor and the kaupoi mod for disengagement of the steer motor when I grab the wheel that @Vili posted. I’ve adjusted settings and get it pretty close to 1 to 2 pixels off and fairly straight. When I nudge the line over 12 inches it seems to get there then has to correct back again and it steers past. I’ve driven for 2 days now and no setting arrangements seem to work? I eliminated the cmps14 by setting 0 inches from ground? It seems the steering wheel is running in bursts instead of steady no matter where I set the min,p, or low. Look ahead seems to help a bit but nothing like @PotatoFarmer said of it staying on 0 to 1 most all the time. Seems little better if steering motor stays moving with min set up higher so it’s always spinning.

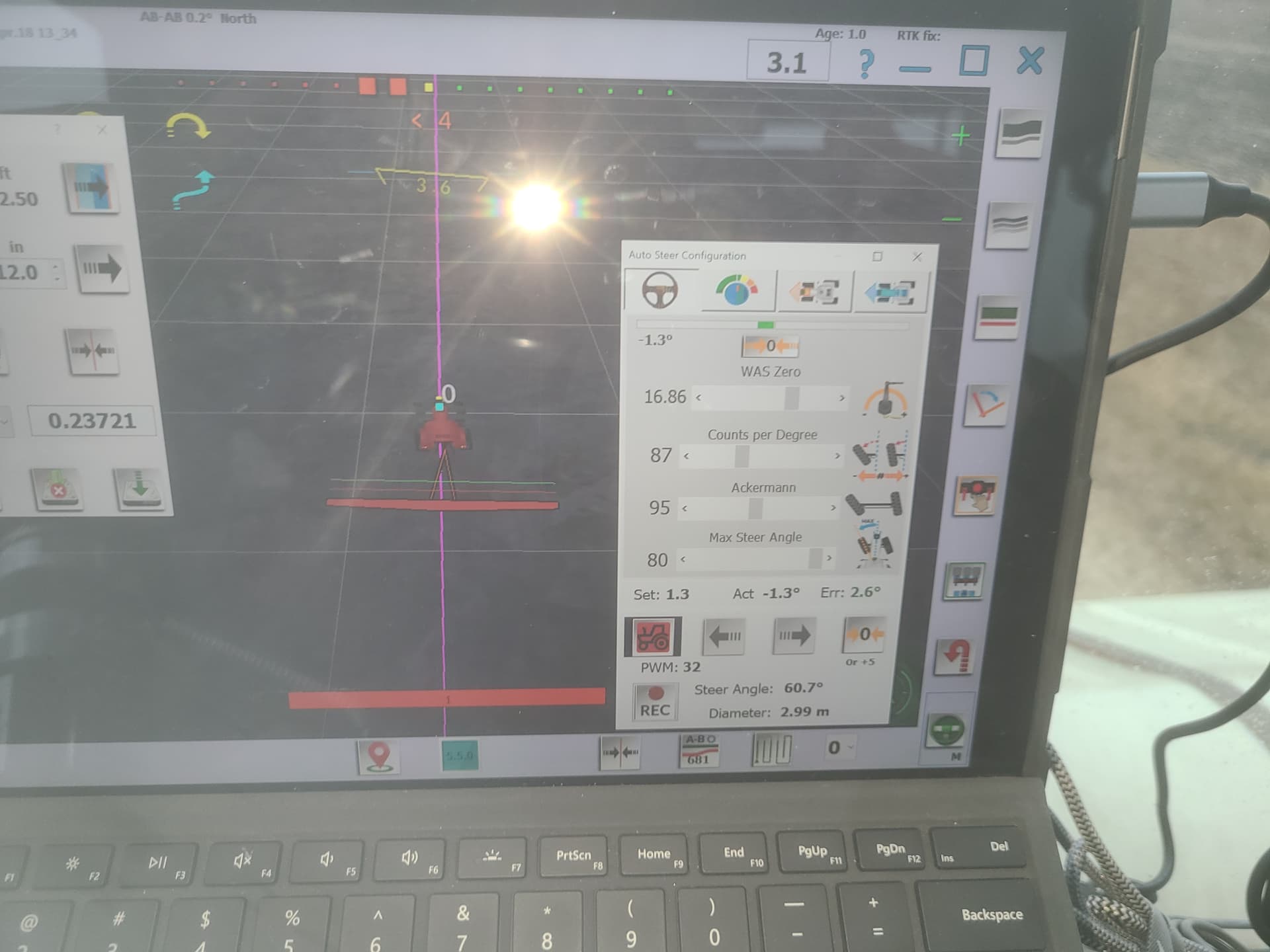
Is it possible the Kaupoi mod with the cytron circuit removed and the little wire added into the cytron have anything to do with it? When motor is engaged, it won’t turn in the direction it’s holding but free wheels back just a bit. I can spin it back and forth a little bit. I’m running on the road also so terrain is flat. Cpd seems to be better between 65 and 80 also. I’m also questioning the Ackerman setting as it seems unclear to me through @BrianTee video of setting it along with the turn radius measurements. I set Ackerman by turning wheels full lock to full lock and adjusting to read equal degrees both ways? My tractor does turn sharper one direction than the other also. I believe radius measurements are in inches for me along with antenna settings? I’m set to imperial in menu so I convert the turn diameter (meters) into inches? Thanks for what you can help me with at this point!! Pcb version 2, rtk through ntrip client through lefebure app from state satellites with simple rtk2b and xbee Bluetooth with antenna on top front of cab roof. I’ve tried shortening and lengthening wheel base and imu versus gps fusion.
I can’t get video to upload but here’s pictures of settings. Processing: 20220420_160926.mp4…
Played with some more settings tonight driving. Found setting antenna distance to 0 inches ahead of axle where as it is actually 50 inches ahead helped the steering to run pretty straight. It would hang at 3 inches off the line to the right. Went across the gravel road crown and moved ab line, it stayed on the left side of the line. As soon as i turn the low or p up it would get to line and go back and forth to just get worse. Keeping the motor power up seems to keep the motor active back and forth and not free wheeling after a pwm command like it seems. The free wheel after a pwm command seems as if its really loose steering kinda. Could this be due to the modification of the cytron to sleep and not hold brake? I was thinking @kansasfarmer or @Vili had talked about the cytron sleeping to take over steering wheel by hand? Or am i missing some settings that are off?
Update for anyone interested, the pulsing of steering (bursts) was slow rates of NEMA messages I assume coming in at 1 hertz. Changed oerteners configuration in u Blox to 10 hertz and steering is spot on. 7 mph with less than one inch deviation. Amazing is all I can say!