It should be plug and play.
You aither use rtk2b directly connected to tablet or connected thru teensy 4.1 to make panda module with IMU. No uno needed, f9p gets corrections thru usb or udp no xbee needed.
It should be plug and play.
You aither use rtk2b directly connected to tablet or connected thru teensy 4.1 to make panda module with IMU. No uno needed, f9p gets corrections thru usb or udp no xbee needed.
Hello! if the tablet has only 1 USB that is also used for charging, is there a way to connect the tablet to the PCB through a bluetooth module like XBee?
So I have everything connected, where are the ino files at? There is no support files on the GitHub. Just confused where I’m supposed to get those. Also do I have to have the WAS connected to test and make sure it’s controlling the motor?
Hire are all ino files.
You can have the was connected to test, i had the motor rigged up but not actually driving the steering wheel so you don’t need your machine running or moving.
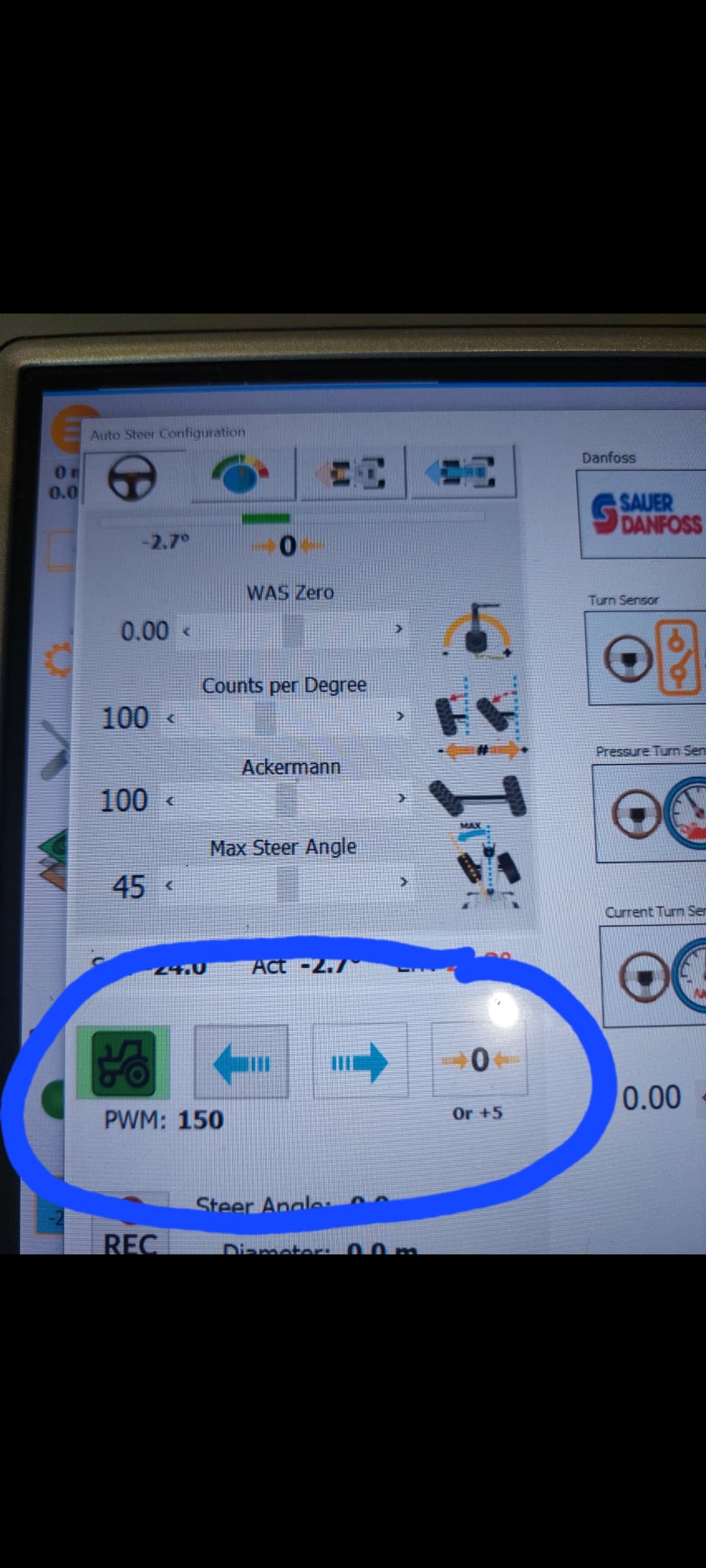
Once you’ve got your ino file downloaded if you go to the steer settings page and click on the tractor icon for pwm it should go green. Activate the autosteer button and If you use the arrows to toggle left and right it should fire up your steer motor.
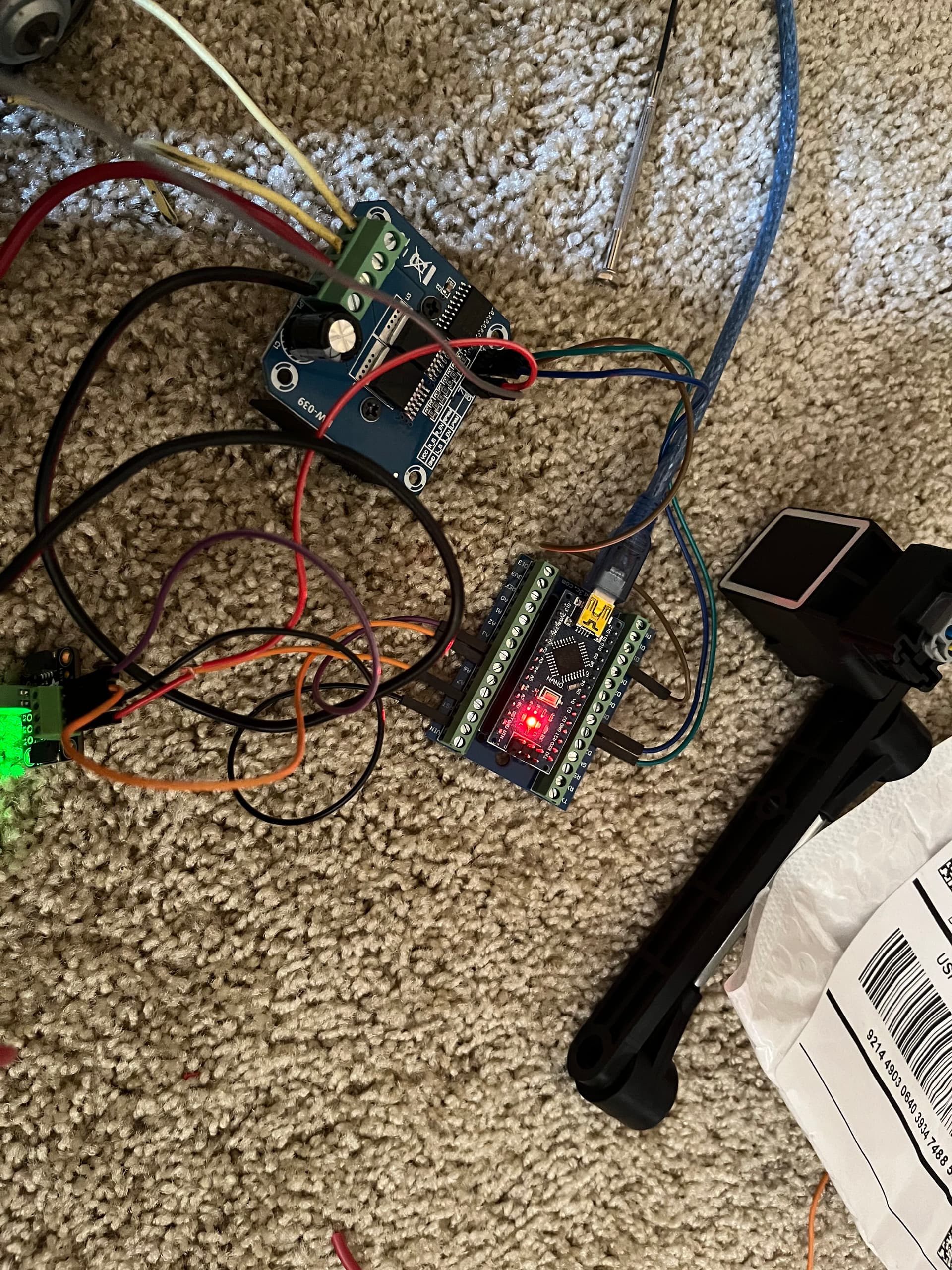
Did you set steer switch to none in aog? If not short D6 to GND.
You also need to have D4 (DIR) connected to both L_EN and R_EN on IBT_2.
Ok sweet it works now, and if I want it to follow an ab line I would have to connect WAS correct?
On tractor, yes