The only use for this kind of resolution (and that’s why I think that most commercial high end receivers uses 20 hz) is for high speed (even low speed) sowing with row clutches or electric motors for tramlines and headland. But they mostly use GPS+GLO, where the F9P can refresh at 15 hz.
Maybe all this is about to get a better system, easier to install and tune… That’s what’s in my mind when i read all about dual gps VS single + bno085/cmps… the better the virtualisation of the tractor behavior the better/smoother the auto-steer would be!
So the question remains each time a new tech pop’s out !?
1 Like
Currently AOG can keep the tractor within 1cm of the line 90% of the time using F9P. To tame the last 10mm, would be great but already diminishing returns. AOG is at 0.33% span error on a 10’ implement.
But I agree there is some polishing to be done, but the AOG program is far nicer than running ez steer’s lineup.
Most implements would be hard pressed to get within 6 inches with side draft and hitch slop. My air drill wanders up to a foot or two over hills and dales. My shanks wander up to a half inch side to side just from spring action of the steel. Then there is frame flex and the packers move around quite a bit. To me what RTK brings to the table isn’t so much super precision, but rather repeatability. It’s nice to be able to go back to the same tracks year on year, and have boundaries that stay put.
Yes accuracy brings things like good section control. And finally RTK allows for accurate topological mapping and also accurate depth control of things like tile plows and land planers.
1 Like
The repeatability is the biggest bonus. Nudge is not a thing anymore, unless trying to offset the field.
Also next fall will be syncing two swathers to the same AB. RTK just keeps getting better.
I would be curious to see this in action on a/b curves. If 10Hz gives a measurement every 28 centimeters, what happens when driving a sprayer at 18 or 20 kph. on a curved line that is curving the opposite way of the sprayer error. It seems like the extra resolution would make a difference in a situation like this. Also wouldn’t there be benefits to higher resolution when using dual antenna for roll?
1 Like
Yes it would help with dual antenna roll measurements. Vertical resolution is always half the horizontal resolution with GPS, so having millimetre precision would make that roll measurement quite precise. It would also make the heading more precise as well.
As for precision spraying at 20 kph, the boom wags far more than 28 cm.
Hello,
You are currently trying it with AgOpenGPS ? Did-you plan to provide feed-back ?
Math
Hello,
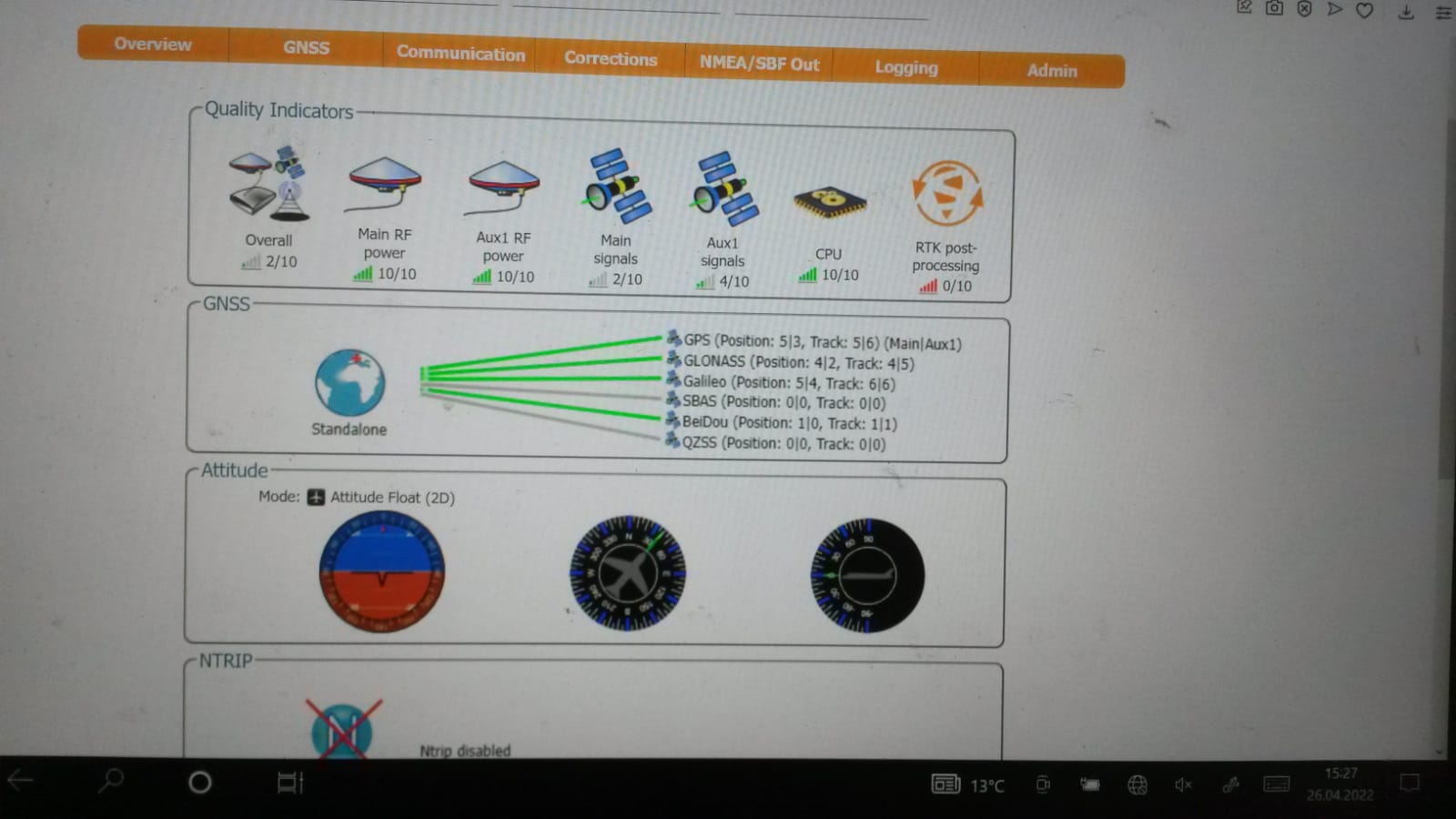
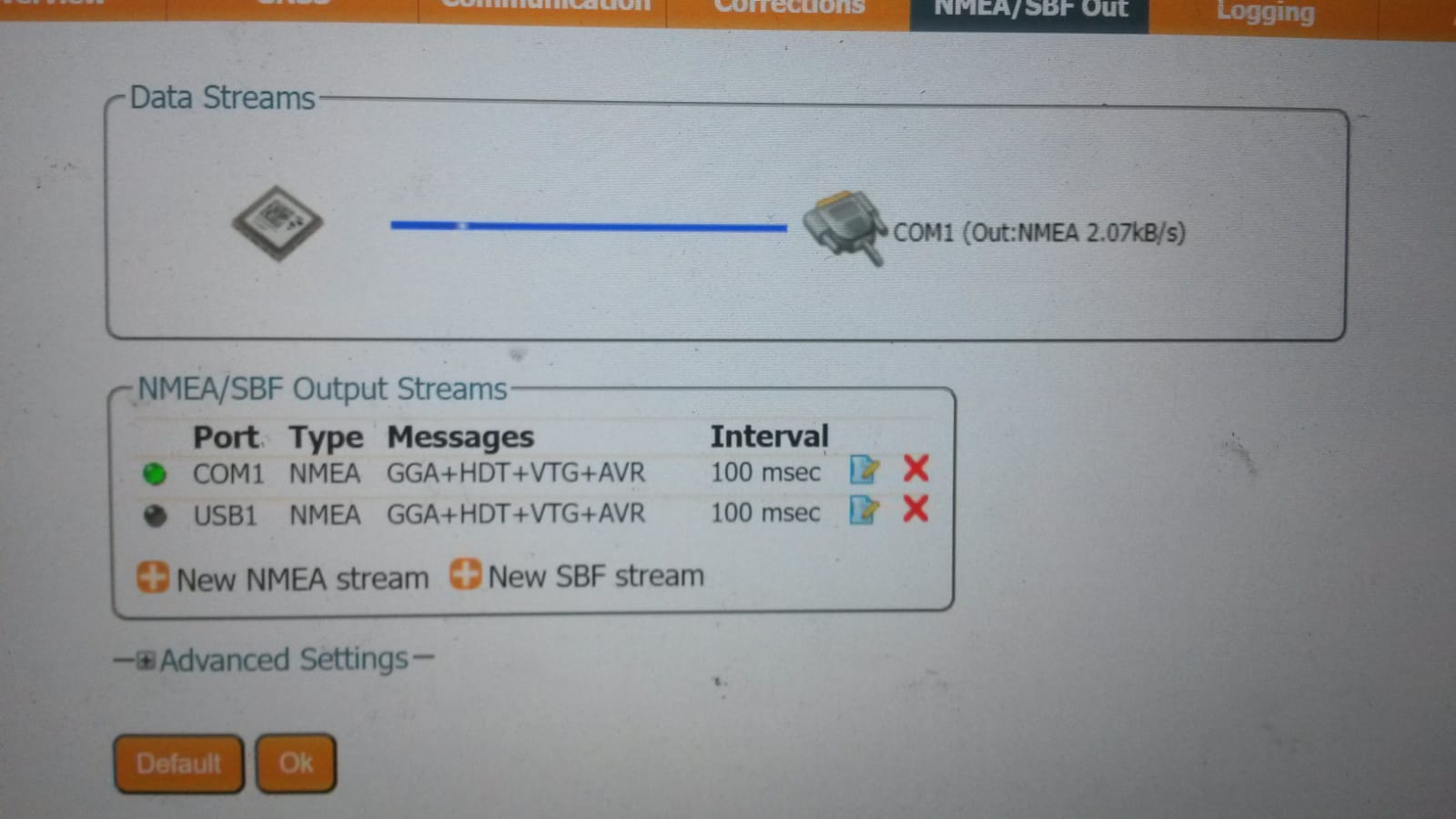
For the moment the card is on my desk and connected to two ridiculous antennas on the edge of the window, which is not really ideal for testing, but you can still appreciate the ease of configuration with its web interface and Aog seems accept the fastest messages at 10ms although I think it is not very useful, it is a compact solution for a dual antenna system and easy to use after on tractor tests are not for now i’m still in v4
Hello Tervuren,
id seems to be the same problem in my case. On Septenreio Interface is everything fine, there are 2 com Ports offered in AGio, but no GPS data is coming to AGio. Could you just tell me, how you solved the problem.
you have correctly configured your card via the web interface?
Yes,everything fine in the interface. I removed the septentrio driver and went back to the MS driver. Now some data come, but after a few seconds it crashes down, and AGopen says: no GPS, Invalid. It seems a driver problem, I guess. How did you solve it? Go back to MS dirver ( = serial comport) and everything was fine?
as indicated previously by installing the septentrio drivers but by selecting another than the one installed by default, use the update of the peripheral driver
I´ll try tomorrow
So, I think nothing is not updated on my tablet now ![]() . But the main problem ist the V5.2 that don´t communicates with the septentrio. I tried V 5.4 and everything smooth. But this septentrini driver is like a plaque. You need it to configure the board but after that you should let him leave the computer. In my case he made some virtual ethernet, that disturbes the internet connection .
. But the main problem ist the V5.2 that don´t communicates with the septentrio. I tried V 5.4 and everything smooth. But this septentrini driver is like a plaque. You need it to configure the board but after that you should let him leave the computer. In my case he made some virtual ethernet, that disturbes the internet connection .
But, as I said, now it runs quite perfect
is there any gain of high speed GPS position and IMU sync like for the PANDA using the higher rate of positioning ?
digging up an old thread. Any more updates or testing on the RTK3B? Kinda interesting looking at this - not necessarily for the accuracy, but for the built in heading and roll.
1 Like
Just in case someone has simmilar issues. I had one - could not connect to COM4 or COM5 (Mosaic USB). Google could but AgOpenGPS could not. The answer is 100% correct - the USB driver was not correct - but I could not find out how to upgrade - I had latest one from Septentrio - and nothing. I finally istalled the debug software from mosaic (Rxtools24) that one had driver - and - correct driver was installed. In case someone asks - the boud rate 115200. Thank you Tervuern for suggesting that this was driver issue - as I could not find how to fix it.
2 Likes
Im really pleased with my rtk3B base/rover kit. I use it mostly for field leveling and putting tile. For those operation, vertical accuracy is vital and it fit the job.