AgOpenGPS
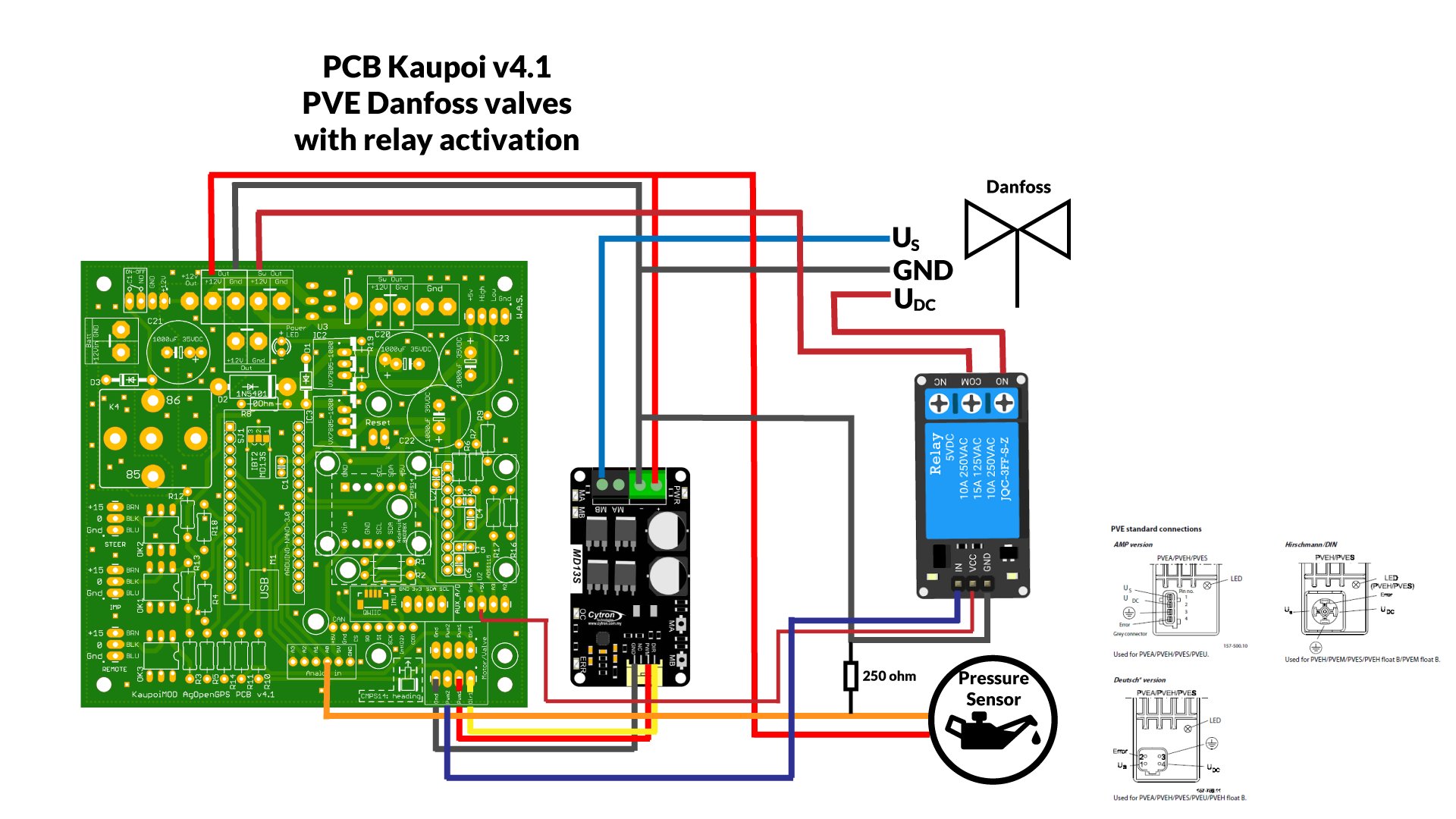
Wiring diagrams
Operations/Getting Started
Getting Started
Vili
23 January 2022 16:17
4
DanfosswithRelay
1920×1080 353 KB
Added Danfoss with relay activation
2 Likes
Alternative to Cytron freewheel modification
show post in topic