as my field bordes are not perfect straight a kind of auto shift function would be very handy.
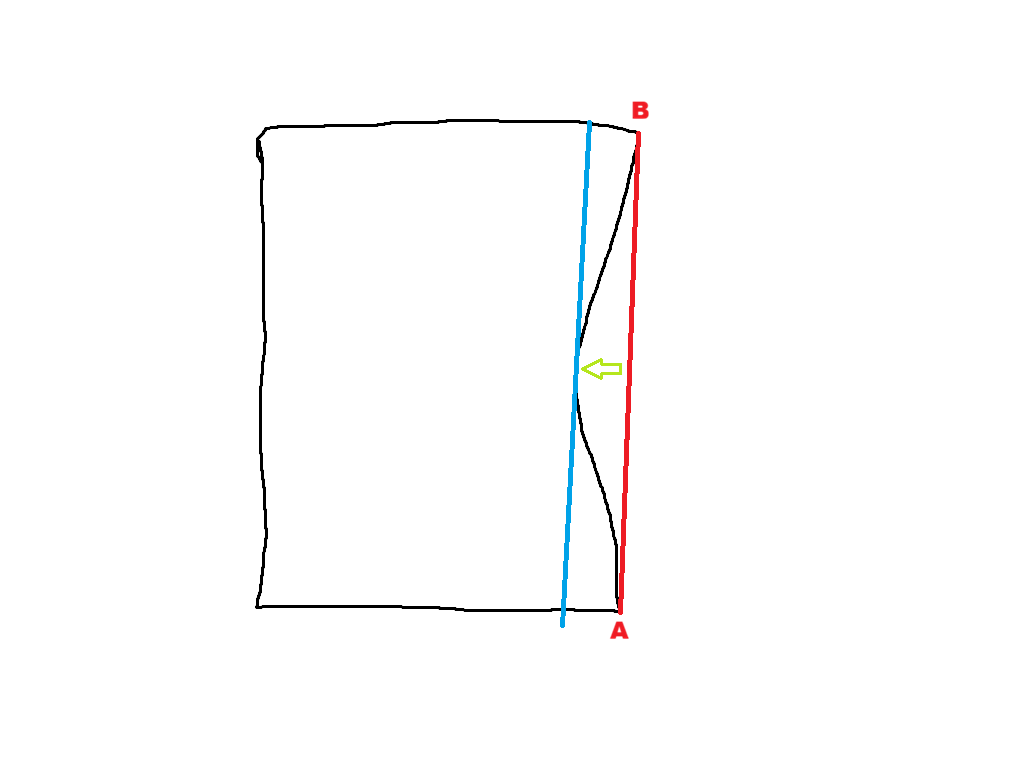
Lets say my right field border has a concave bow as shown in the sketch.
Creating a A-B line in the editor I would run over the field border (red line).
I imagine of a function that moves that A-B line field inwards to the closest point. (blue line)
Like that I could run straight lines without the risk of running outside the borded on half way of the field.
I’m afraid a good solution is more complicated than the shift you propose if the intention would be to cover most types of odd field borders.
Do you feel a manual wayline shift is not accurate enough?
I usually do these manually but would like to see a generic (graphical) tool that can shift A and/or B points a given distance, A and B points reversed or the AB-line turned by a given angle etc. Zooming to “critical” points would help adjusting the waylines as needed.
Hello, in my opinion, in the case you describe, it is best to use headland builder and, on the curve side, make a lane for 3 machine passes and mark the AB curve on it. Then you will have marked where to work according to the straight line ab determined by the straight edge of the field
In my case I am seeding corn and would like to start with straight rows right from the first pass.
Manual line shifting is not really an option. If I see on half way that I have to shift over the next pass will not fit to the previous row distance.
A graphical zoom in would really help a lot.
At the moment I drive the first pass without seeding to get a feeling how much I have to shift the line when the implement is moving out of the field border.
I did not mean you would do a manual shift while working on the field. I would do AB-line planning before entering the field.
By the way, are you after an AB-line exactly as on your drawing or do you mean an AB-line that would be half your implement width away from the field border (at the most tight spot)?
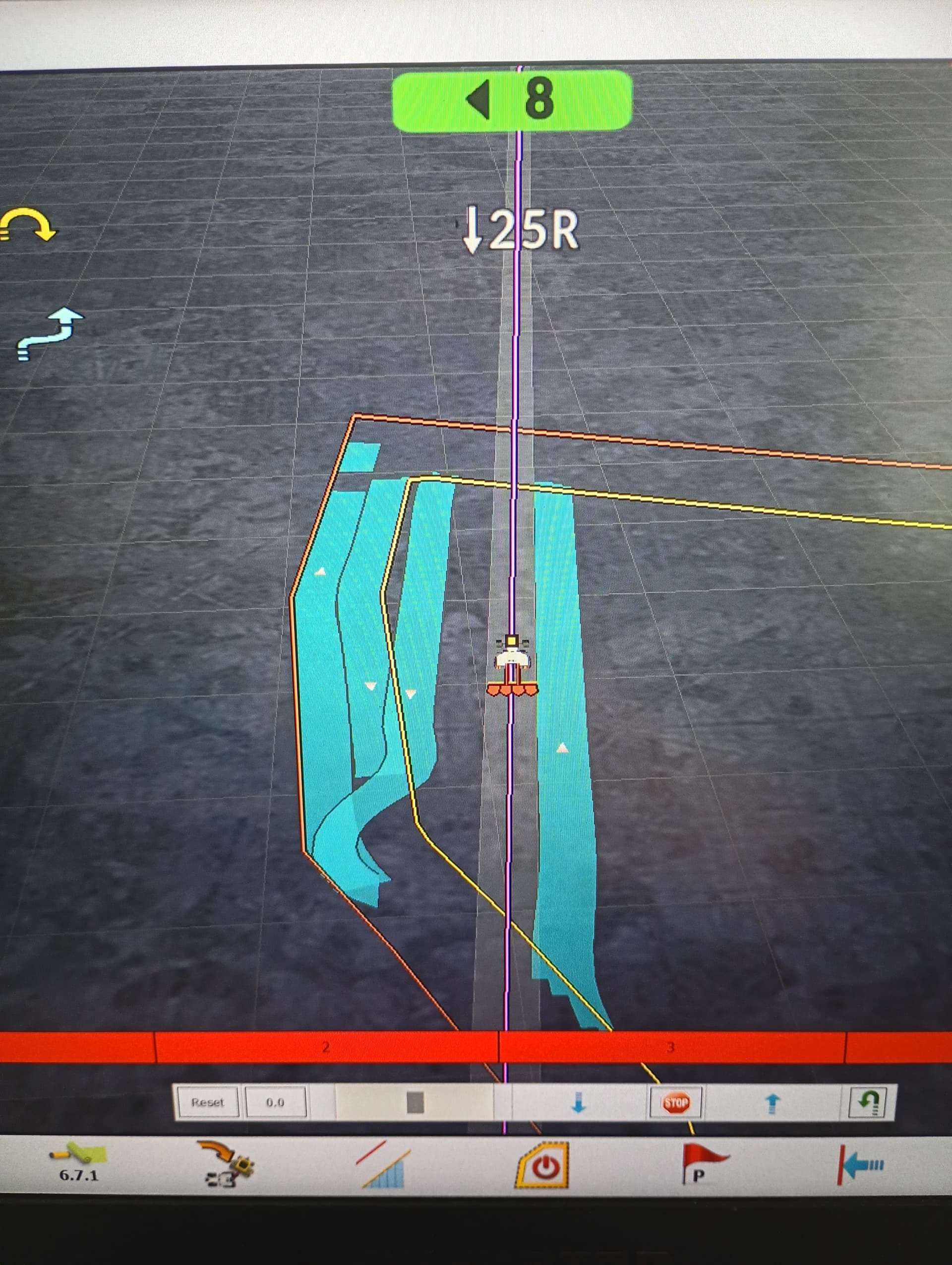
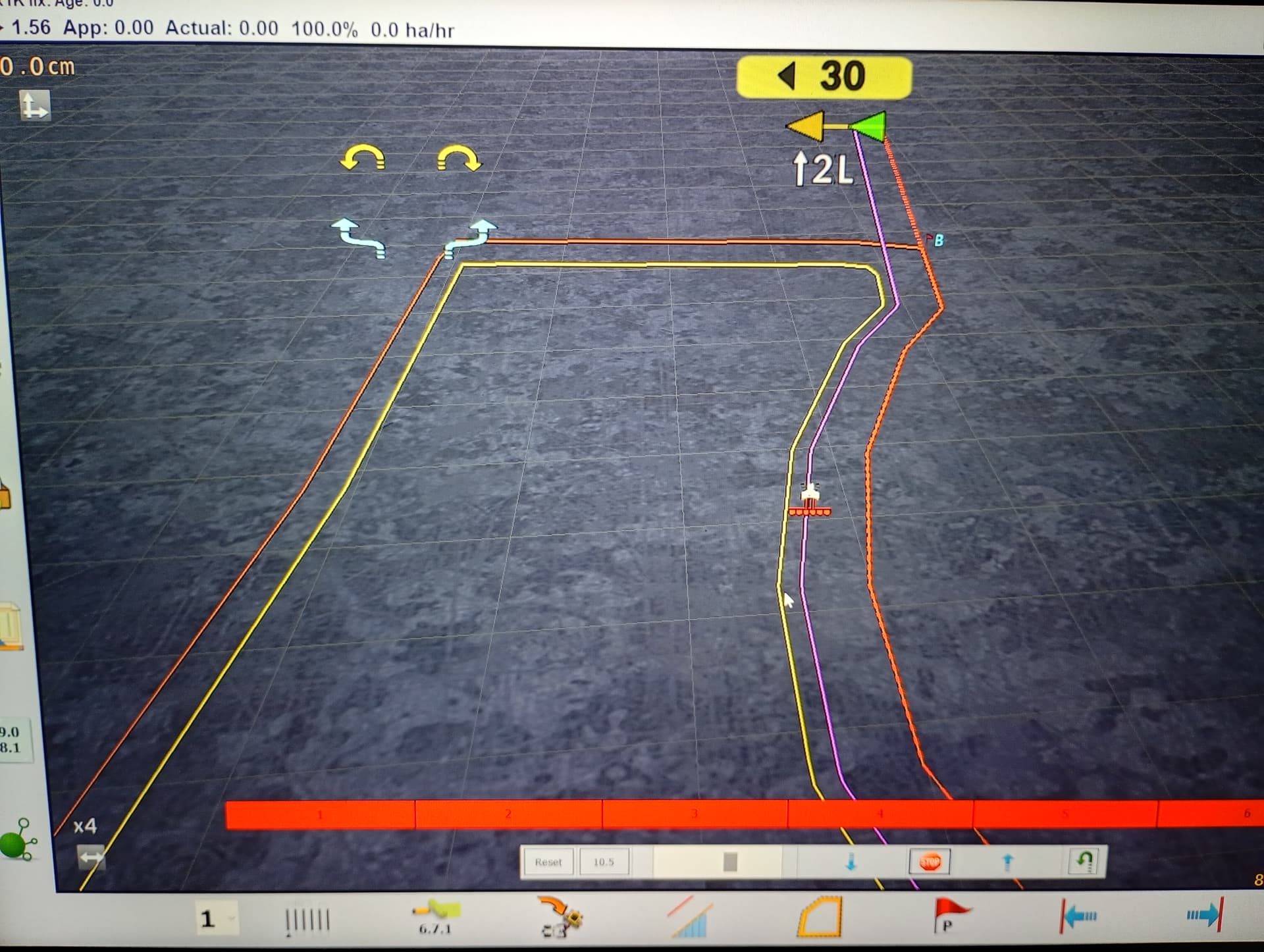
I think you can achieve the effect you want by using the headland builder, creating straight AB lines or AB curves, and switching between them. I’m adding two more photos from the simulation.