How to connect a serial cable to a BNO085 IMU:

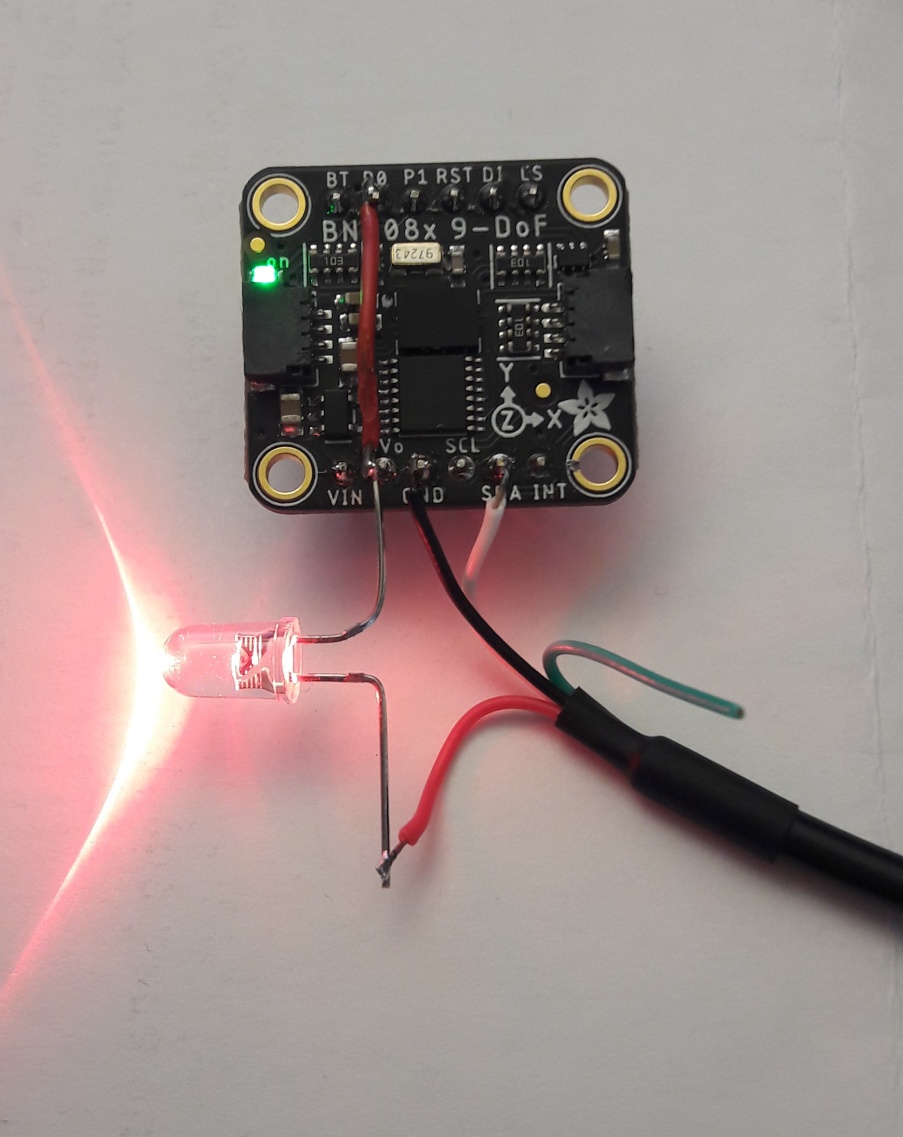
Connection of USB-Serial-Cable to BNO085 in RVC mode: 1st pic shows USB cable supplying board with 5V, if there is a voltage regulator on it; 2nd pic shows the same cable w/o using the voltage regulator. The 1st is prefered for this Adafruit board, the 2nd is for all boards w/o voltage regulator. Supply voltage is about 3.05V in that case ![]()