It makes no sense though, because AOG doesn’t turn on or off the external light bar. It just sends the byte to the arduino all the time along with all the other data.
Hi! I do not know if it this is the most appropriate place for my problem because is repeated with version 5.1 and 5.2:
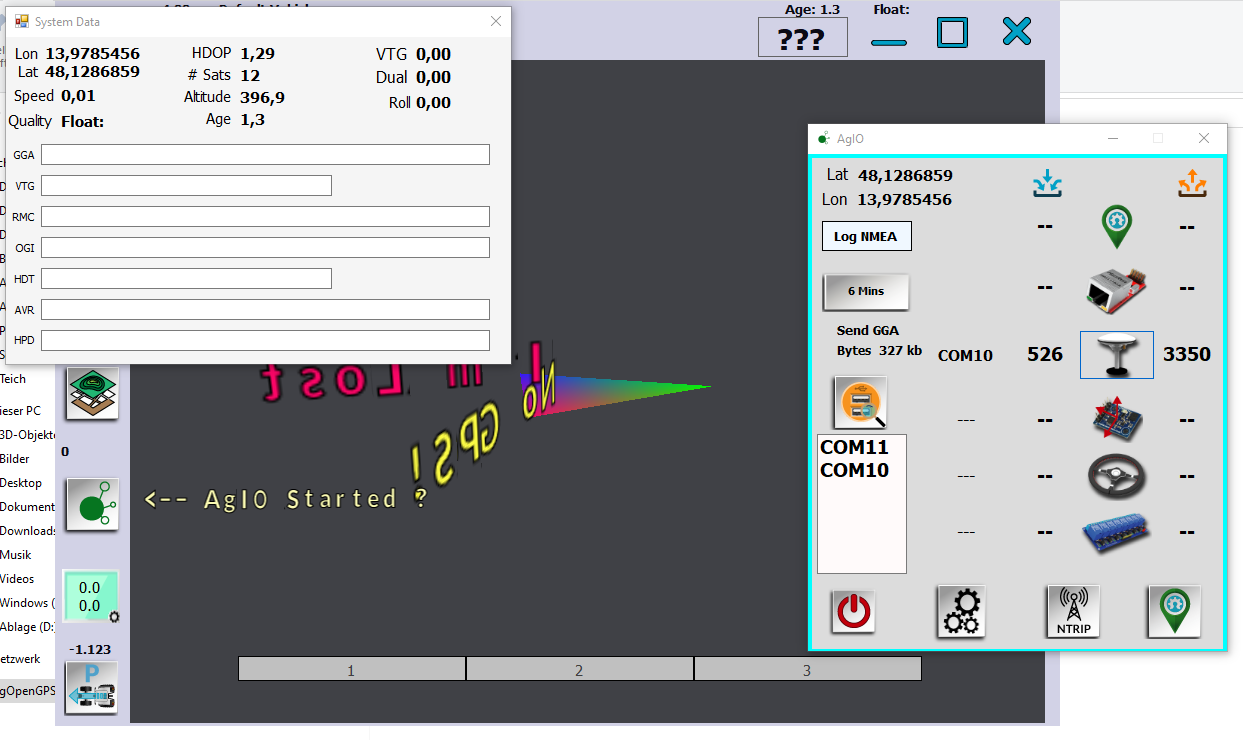
Agio hangs up when I connect my tablet to the internet, either via Wi-Fi or with the SIM card inside. The problem seems when the NTRIP connection to the public servers network begins. And then “i´m lost”…
Possibly it is important to say that when I try to simulate this connection on my desktop, everything works fine; the only difference is that the u-blox antenna (fixed mounted on my tractor) is not connected at that moment.
I don’t know if it will be relevant but I connect my steer pcb and my Ardusimple with my tablet via bluethoot, with two HC-05 boards.
If I turn off NTRIP everything works perfectly but I will need RTK.
Does anyone comes up with something?
I have been finding the steer indicator strobes green and red, does not seem to cause operation issues.
I am using just the screen steering enable button. Also have rapid refresh on.
Is there a reason to only count the pin high pulse on the encoder? Rather than high and low?
Only reason I ask is I delete the highlighted part below so a pressure switch on hydrauic valve cuts out if pin changes high-low or low-high when the max count is set at 1.

no reason other then counting twice as fast. Would work either way. There are sooooo many setups, it is really hard to have one program do everything - so you have done the exact right thing.
Is this part of the ino still used in AOG ver 5.2 when using the Nano A0 pin for pressure switch /transducer?
A0 = Transducer 0-5v
Encoder = 0/12v switch (Standard Normally Closed)
Works perfect as standard, Just if you use normally open switch you have to slightly change ino to suit (can be NO,NC, or both) but as Brian says too many setups so best just set as needed by the user
Another A0 bug, I caught on camera during the rain.
Steer Indicator was strobing red and green. Turns out after testing the ACS712 was working just fine and the nano was getting the info, but it does not fully disengage the steering for some reason. Just strobes and keeps steering. changing the set point definitely works.
you cant hear, but the motor is just buzzing during the 20a setting.
Everything works except disengagement, somehow it needs or is bypassing a one shot
I added a momentary steer switch and the issue disappeared, so it must just be with the software button.
I see the problem when using 12V and NC switch.
I was assuming 5V and a NO switch, that would work on A0 at almost any pressure setting in AOG
Thats because the encoder cutout (Encoder, Current or Pressure) is writen to use with steer button, when using with no steerswitch like you are I rewrote mine like this below and set the steering wheel in bottom right corner to “Remote” then it cuts out on the pressure switch and engages via tablet.
else // No steer switch and no steer button
{
if (previousStatus != guidanceStatus)
{
if (guidanceStatus == 1 && steerSwitch == 1 && previousStatus == 0)
{
steerSwitch = 0;
}
else
{
steerSwitch = 1;
}
}
previousStatus = guidanceStatus;
}
1 Like
Will give it a try, but I trashed my 3D printed gears last night so I am down for a bit.
I can’t run V5.2.1 - No GPS Signal, following behavior:
If I run v5.2.1 I get no GPS Signal
If I close v5.2.1 and start V5 GPS Signal works fine ?
Also v4.3.1 is working fine!
If I switch back to v5.2.1 no GPS, sometimes for 1 sec it seems that a GPS-Signal will appear on the screen, without any further success.
I’m using C099-F9P Receiver via bluetooth.
Any Idea?
You seem to be sending a lot of sentences - 3350 bytes? Sending only VTG and GGA would be the first thing to fix
Seems to me it’s a firewall issue also…
I found out that GSA Packet was still activated - so I cleaned it up and only VTG and GCA will send. - It seems that v5.2 is working now.
Thanks a lot!
1 Like
I’ve used 5.2.1 for about 60 hours of spreading this week and have got on VERY well with it!!
A couple of points.
Altering any setting whilst working, or indeed at any point, causes a reversal of direction detection. It happens every time and will cycle forwards and backwards on every settings confirmation. Disabling detection prevents it and just gives a heading disturbance but then re-alignment of heading takes a considerable amount of time at every headland if you reverse.
It’s not a bug per se I suppose, and is perhaps alleviated by using higher GPS heading bias? BUT steer is WAY better on rough ground with IMU bias. In every day operation maybe it’s not really an issue but I spend a huge amount of time altering settings to get the absolute best operation. It is now VERY stable over large speed range.
What doesn’t help is if steer settings form is open, it defaults to covering up the reverse arrow so the first thing you know is severely wayward steering on activation.
My second point is less a bug, more of a safety thing. When using contour especially, at the end of a contour or where two cross AOG can sometimes give huge unwanted steer deviations. I have wondered about coding my Teensy to disable steer above a certain deviation but thought it would be a good safety point to add to AOG?
None of this detracts from how absolutely amazing AOG is now. Really smooth steer even with direct angle request via can.
A local large scale dairy farmer commented to me, “that’s some seriously cool tech you have there. We have Trimble and it is shit!”.

11 Likes
I see same behavior in 5.2. Watching the roll just after entering the change, indicates that the reason for shifting direction is the 360 degree spin roll makes at every start/change.
So I stop when entering the change, and it sorts the direction by itself.
1 Like
One thing i did forget to mention. If for some reason the tablet has no internet and you request a caster table or confirm IP address, AgIO hangs and requires a forced close.
As you can imagine there are sooooooo many settings in config form. When you leave the form, it then updates most of the settings almost like a restart of the program. AHRS is a class that does all the imu, heading, roll, settings - all 2 million of them, and some of them are averaging types of settings so when you leave they start from scratch and take a bit to reset to normal.
It’s “easy” just to redo all the settings rather then keep track of all the individual settings you may have made and then try to figure out how much to reset when you leave. Some settings depend on other settings and the reset chain can get quite long, so the safest is just reset everything. So its a downside of having all those settings in one place.
Contour is rewritten for 5.2.2 and should behave a lot better. Coming out today i think
1 Like
Ah yes, I guess so. I need to be patient and wait till the headland to mess with stuff!!
Contour does actually follow REALLY well. It always amazes me how it keeps the maize drill spacing so accurate even on really bendy headlands!! Way better than I could with markers.
1 Like