Hi Group,
I have a tricky one here.
My equipment:
AOG 5.7.2
PCB v2 with Panda Hat with BNO
Teensy 4.1 with PANDA V5
When i go through the setup wizard the motor steers left and right to set Min PWM. But when i setup proportional gain the wheel motor turns to the right. When I turn the wheels all the way to the left and then want to steer the wheels to 0 ( center) the wheel motor starts and slows doen when itvgets close to 0 but then obersteers all the way to the right and further.
I can place the tractor left of the AB line and it steers toward the line but then keeps going to the right. I’d guess my Cytron is briken if it would steer to the left when i setup Min PWM.
Not sure if this is a software bug or if i did something wrong, i cannot find anything obvious. Has me stumped.
Any suggestions for trouble shooting?
Regards,
JB
Did you try change motor invertion in settings?
Double check your was is reading correct
Postive numbers for right turn and negative numbers for left turn i think. If its wrong you can also invert it
Yes, Motor direction is correct.
When I turn the wheels to the left and let AOG bring bring the steering angle to 0 degres the motor brings it to 0 degres even slowing down when it gets closer to 0 degres, but then speeds up again going right past 0 and doesn’t stop.
Was is correct as well. Once this happend i played with all possible scenarios.
But i cannot invert motor direction through AOG. On thr cytron i can buy pushing the A and B buttons.
I didn’t do any current sensing modifications to the cytron either.
It’s like steer system still believe you have ibt_2 motor driver!
Yes, the DIR1 pin stays low.
I replaced the teensy and the Problem is gone.
It steers fine now…
I wonder whats going on with the teensy.
I have to correct my statement, It seems there is a software bug. When i match the pins so it works with the Teensy Hat the new teensy does the same.
Even when changing the motor driver from cytron to IBT2 back and forth.
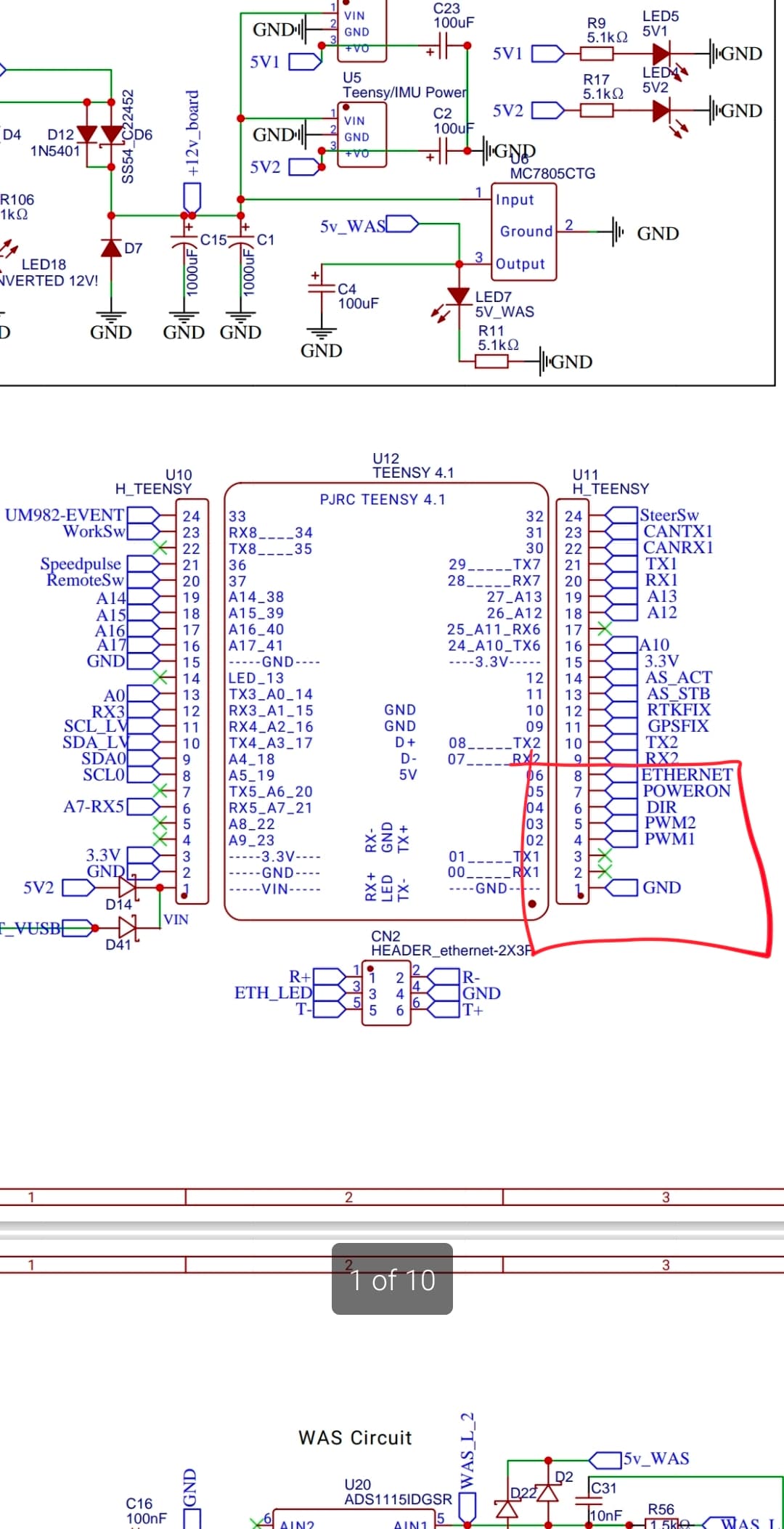
The Teensy hat uses pin 6 for DIR, 4 is PWM1 and 5 is PWM2, other than that pressure and current Sensor pins have to be remapped, that’s all.
Did you find out any other reason that may have caused this issue? I have the exact same issue currently … Always steering right. I do have a V4.1 board, but not sure that is much of a factor.
Did you upload the correct firmware? I ended up getting the v4 boards, that solved it for me . I never figured out what was wrong.
I re-flashed the software and still no good. I took it to the test bench and got the same results. It would make sense that it is the software at this point. Did you use config app?
Back then i used the Arduino IDE. I downgraded the teensy software and used an older version of aog for the season. It was somewhere around aog v5. something… for the next season i ordered v4 boards. Just double check you have the latest firmware for the teensy and with that it “should” work. The dir pin comes straight out of the teensy to the cytron. There isn’t anything inbetween if I’m not mistaken. So either it’s the software or the cytron. For freewheel i had to add a cable from the board to the 4 pin connector on the cytron though. It does not work with the 3 pins provided on the 4.2 board.
Good luck.
Thanks for the tip, I will try a couple older revisions and see if any of that sticks. I ordered a new Cytron board so maybe it is just that. I checked the continuity between the PWM and Dir on the Cytron and any of the teensy board pins and I got nothing. I couldn’t find which of the Teensy pins that is supposed to be connected to.
I found the issue … the trace on the pins on the cytron for DIR were damaged. Hence getting no continuity. I had a cable connector lying around and tried that, immediately started working. Appreciate you helping me with this, I’ll wait to attempt the free wheel mod until i get another cytron board in !
3 Likes