Hello,
I am building my first AOG setup and my first though was to give a try to the amazing job done with Panda, using a Phidget motor with a IBT-2 driver.
As far as I could read/understand in the Panda INO file, it is intended for GPS+IMU fusion and does not handle the autosteer part.
Has anyone used Panda with autosteering in the same Teensy? Does this setup make sense to you?
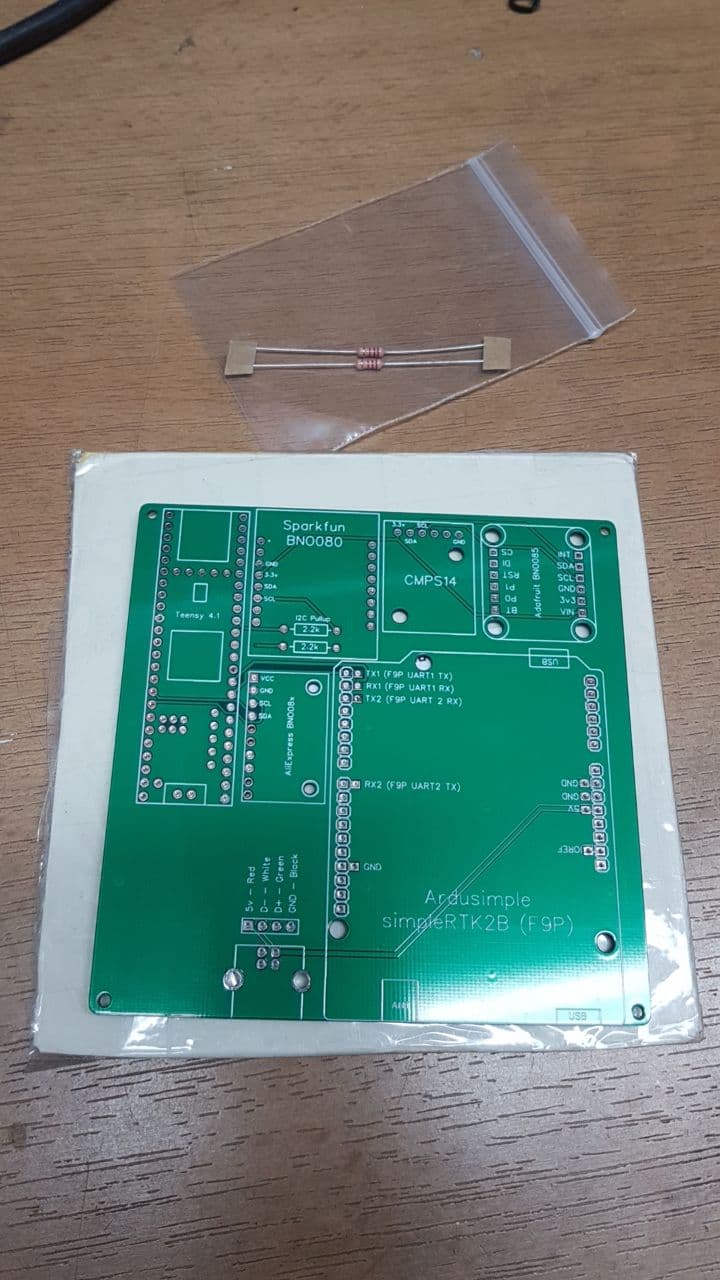
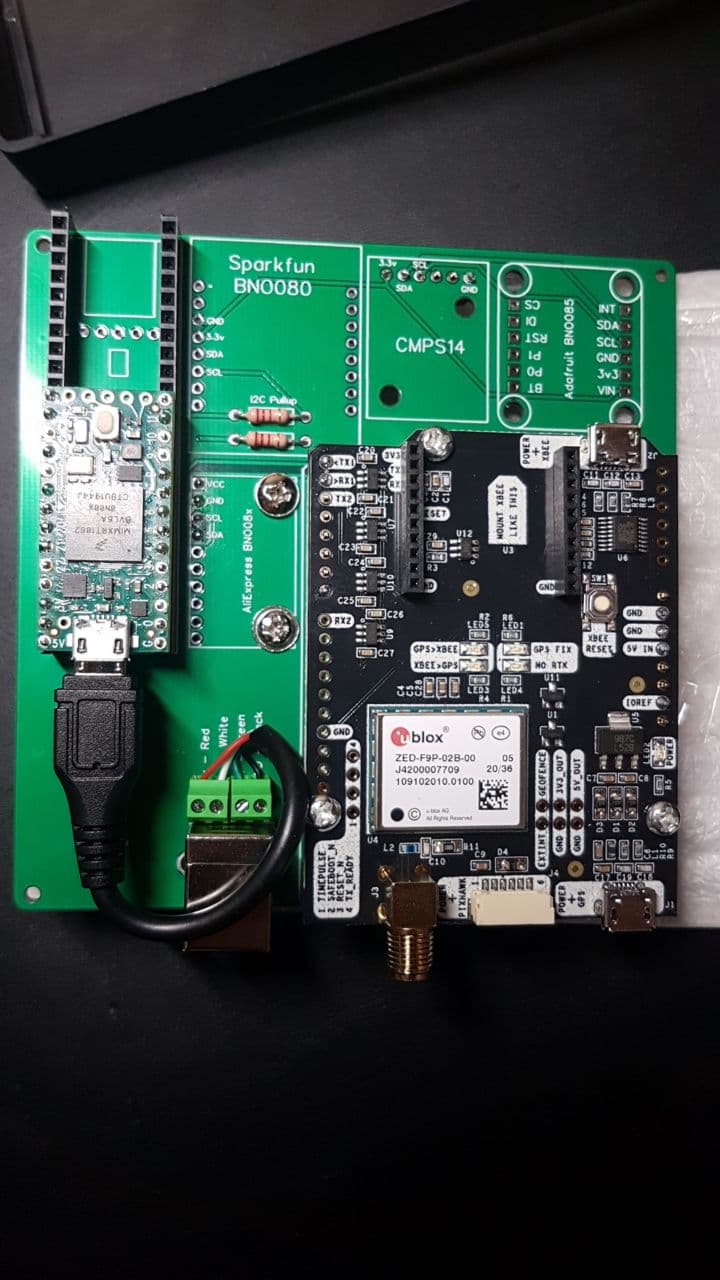
As hw components I have:
Ardusimple as GPS
Teensy 4.1 as micro
Phidget motor
IBT-2 driver
BNO085 (I hope to receive it soon, fingers crossed)
Wheel fitting for the motor (I have it working, a few years experience with Cerea helped)
In case it is interesting: some arduinos, esp32, esp8266 are also available in some drawer, also a pi.
AgOpenGps does not plan to work without WAS, it is a very simple system that provides many advantages, I cannot understand the fear that WAS causes in users
Well, I would not say fear, however having to install a WAS, in a vehicle that does not have one, is somehow inconvenient indeed.
And if by using the IMU+GPS option that could be avoided, for my user-case, it is a better solution, as it requires less installation time, less cables over the vehicle, and enables to use the same system, as plug and play, in both: harvester and tractor.
Vili, do you think that the AOG will work fine with GPS+IMU+Panda (without WAS) in its current 5.5 version?
Experienced users please develop algorithm a set up and testing Panda.
For example:
Take a pole, fix the antenna on the top end of the pole, measure 200 cm. and fix the pole at this point on the table (this will be the center of swinging).
Settings - Antenna Heading Type - VGT.
pole straight up
wait for RTK
zero the roll
create field
run the test with swinging pole
tilt the pole 10 degrees, you should see:
Antenna - 0.14 cm. (cathetus b), if the measured value is greater you need to increase the height of the antenna.
Correction Distance - -0.18 cm.
Correction Easting - -0.04 cm.
etc.