I’ve been chipping away at this project now for a few months and have been able to get the communication between the rover and base station with RTK fix, through the SNIP caster. My problem begins with the communication between the base station and SNIP.
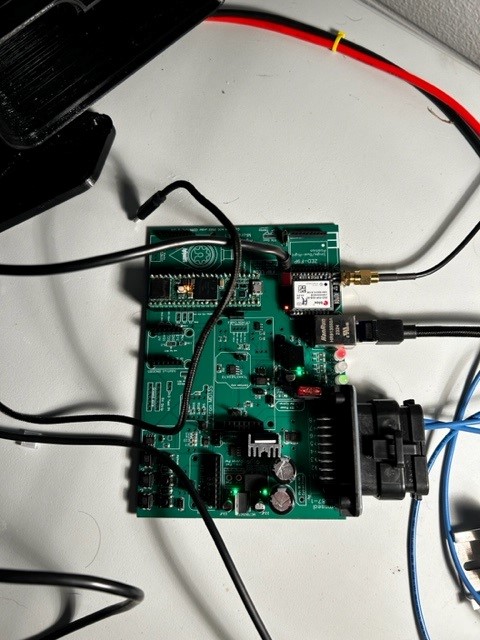
I’ve attached a picture of the base station set up I am currently using. This is a V4.1 board with an F9P (loaded with V1.32) and a Teensy. I am able to connect the F9P directly to SNIP through the micro USB, but unable to get anything through the ethernet port.
My main question is if this is the correct hardware for the job? Or is the all in one board plus teensy specifically for the rover. I have searched through the various forums and found numerous solutions. My goal is that I have something that communicates to the caster over ethernet / UDP. Would a PI be a better option for not wanting to be connected to a laptop full time? Or will this create further problems?
In your picture the F9P is receiving 3.3v power from the 3.3v vregs that are connected to 12v on the Ampseal. The USB plug connection is straight into the F9P pins. The Teensy is not doing anything useful for you in this picture, and the ethernet port is connected to the Teensy.
The AIO board was designed as a rover only, but you can hack it into a base station. You would need some Teensy code that reads the F9P and connects it to UDP over ethernet and maybe some code to do some LED stuff and nothing else. No one has ever written that code to my knowledge (I’ve thought about it before), but its not a lot of code and its not difficult code.
I would say that opening the Teensy to the internet is not going to be a user friendly experience if you ever want to change any settings, and it might not be possible if you don’t have a static IP. In my opinion you are better off with a computer in the mix and having some sort of GUI. RTKBase on a Pi and SNIP on Windows are examples. I really enjoy the ability to check RTKbase from my phone or the tractor tablet.
I build myself a base station with the raspberry pi hat wildbuckweat designed. Had to order 5 so if you are interested I can send you one. I am in The Netherlands
@WildBuckwheat that would make a lot more sense as to why I was having so much difficulty with the previous set up … At least I have supplies for more rovers now if need be.
I went out and purchased the components to make the homebase set up with Pi3 like you had mentioned above. I’ve had success with programming, assembling and the running the set up and i think it’s going to be much easier in the long run!
I am currently confused on how to get the rover to properly connect to this though. I had been using SNIP before and that seemed to be easy enough, but now when i check on my mount point being active I can’t seem to find information anywhere.
As well, I am unsure about the post processing of the data and how to exactly deal with that. I have only had it up and running for about 2 hours at this point so the data wont be overly amazing, but what are suggestions for post processing the data and how to go about doing that?
I think my ideal set up would have the base station about 40’ from the house, still in range of WiFI, and use that to cast to rtk2go.
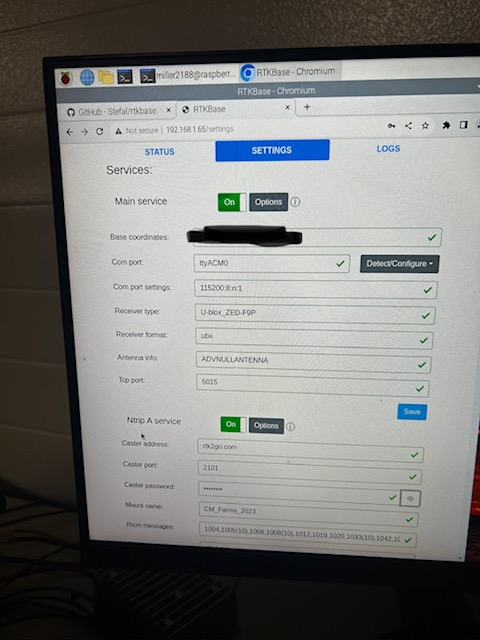
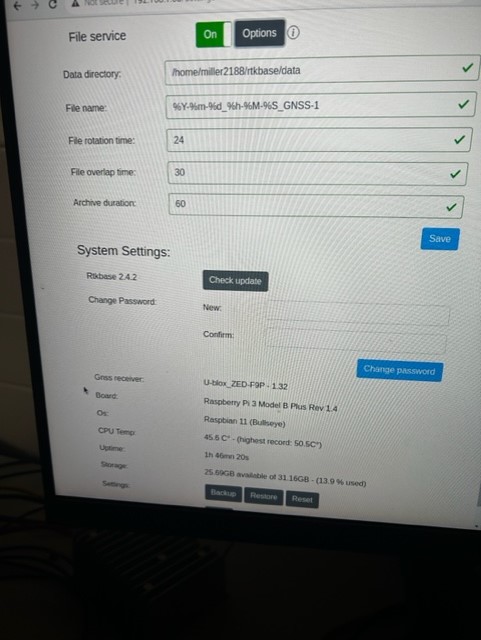
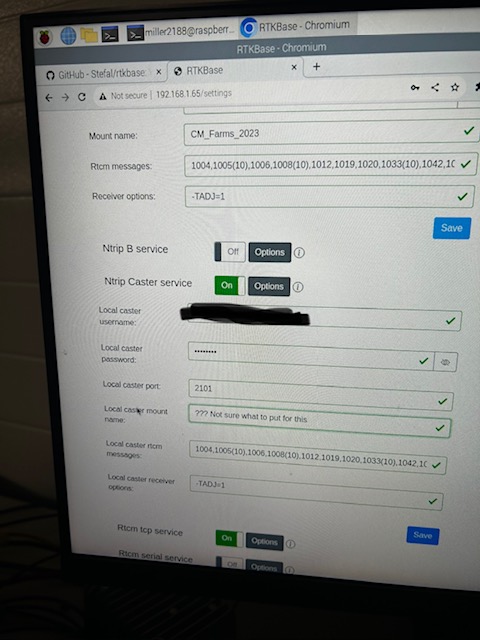
I’ve attached some pictures here of the settings I have currently based on what I saw in the github post, feeling like a lost puppy dog with this one!
Appreciate the offer! I live in Canada so that shipping might have been fairly expensive. Just have to order 5 for myself as well … hopefully can get rid of a few of these.
For the post processing: you don’t have to for it to work. You can just copy/past the lat/lon/height to the main service → base coordinates and it will work. Make sure you include the height, it wont work without height. If you ever need to move the base everything might shift a few inches, but it will work.
You should do the post processing so that if you ever need to move your base or switch bases that everything will still line up exactly. I don’t remember exactly how I did it. I think I took a 48 hour log, converted to rinex, and then went to the NRCAN site and uploaded. Use WGS84 coordinate system. They email you back a pretty report with cooridnates.
The Ntrip Caster Service you don’t need turned on for what you’ve said you want to do. If your tractor was connected to the same home network/wifi then you can use the Ntrip Caster Service instead of rtk2go. I use Tailscale on my pi and tractors which creates a VPN tunnel and makes them appear on the same local network, that allows me to use the Ntrip Caster service instead of rtk2go. It also allows me to remote desktop, file share to the tractors, and access me base from my phone. You can use the Ntrip Caster Service at the same time as the Ntrip A and Ntrip B services if you want. I have rtk2go ready to go, just have to turn on the service.