The tricky part there is knowing your heading when standing still, backing up and going slow. Huge amount of code to make sure you always know your heading < 2kmh.
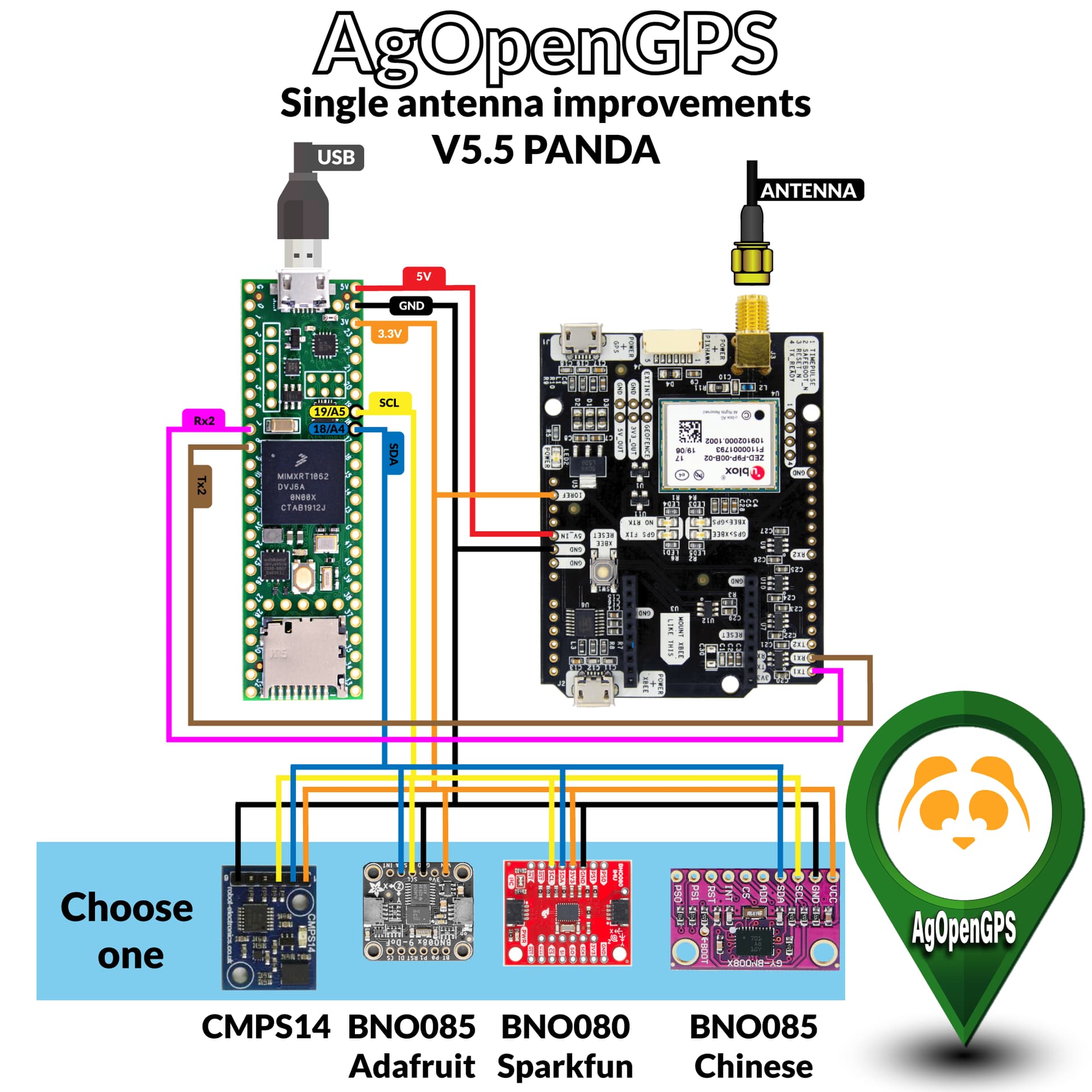
I need a joker, help from a friend. The connection is clearly there is a scheme. I use cmps14.
- Which github ino files do I upload to teensy 4.1? All of them?
- Should I reset the NANO and upload again only the steering ino?
- F9P and cmps14 are in one box? Where to mount the box? I intended to be at the bottom right of the seat where the PCB is.
- Cmps14 direction?
We kind of need to finish testing it and getting the ino written before that happens.
I will test too. I’ll tell you if a caveman can autosteer:)
Just need a lot of help
Hello,
I am a beginner. In UDP, I set the port number of GPS to 10000. In the software, GPS does not receive data. Is it the wrong port, but IMU port 5578 can receive data.
Using the USB port, you can receive GPS data, but using UDPclient can’t receive data, I don’t know why,
I am currently building PANDA but I don’t get the IMU data into Agopen via the Teensy!
GPS position is getting through!
Wiring is correct as shown in the graphic above.
Is there anything to check on the software side?
At the moment I have loaded every code in the Github PANDA folder onto the Teensy.
I hope you can help!
Greetings from Germany!
You are receiving the PANDA message in AGO but roll is always 0?
If it’s the teensy that doesn’t receive the roll check for the good “wire”(SDA SCL) in the ino. “wire” is on pin A4-A5 “wire1” is on pin A2-A3
Some codes use “wire” other “wire1”
Please remember - all code is rapidly changing on these new developments. Hopefully we can get some of this stuff finished - so player be ware!
Thank you!
Exactly that was the problem.
I will look into the code and eventually change the setup.
Hopefully it works!
I’m just too impatient to wait until everything is perfectly finished.
It seems as I’m gona join the testing group!![]()
1 Like

4 Likes
How can I find version 5.6 pre on GitHub
In @BrianTee_Admin 's AgOpenGPS github, but not the “master”, it’s “DanielSingle” but it’s in development, like an update a day!
If you want to take a look.
But it’s better to use the v5.5 release, this one also works with PANDA,
No need to use v5.6 until official release.
1 Like
Does this configuration fully support NTRIP corrections from AOG via the same USB as Teensy is connected? How about when all is connected by UDP (with ethernet adapter on Teensy)?
NTRIP works in both configurations. ![]()
With the traditional installation, my BNO80 is installed on the tractor gearbox. What about PANDA where do you install? can the entire enclosure in the cabin be even if the cabin is amortized?
I have cab suspension and I plan to put the antena in the front and IMU on chassis.
I have a U-blox ZED-F9P (SparkFun) set up as a base station and a U-blox C102-F9R as a rover. The base station is sending correction data to rtk2go via RTKLIB’s STRSVR. The over is receiving correction data via rtk2go’s NTRIP Server via a wi-fi hotspot on my cell phone to my laptop. I’ve plotted the deviation map over the course of an hour and I am very satified.
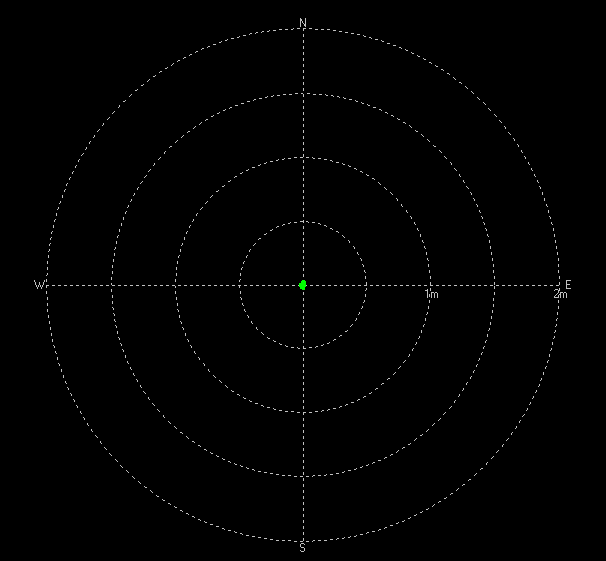
2 Likes
Let me know if anybody needs a write-up on the process to set this up.
1 Like
It would do the group good if you would do a write up.