Hi All!
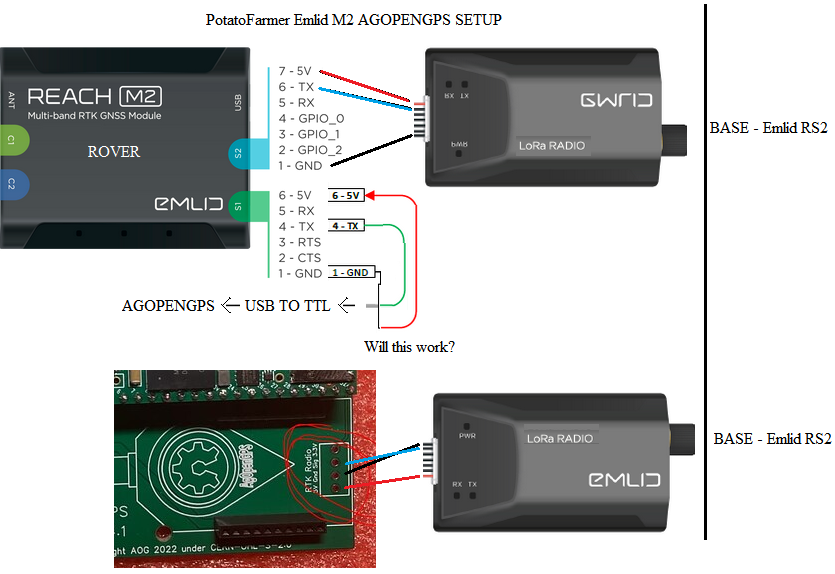
Following up on using an emlid lora radio as source of rtk correction data, as per potatofarmer using a rover with M2 attached to a lora radio and communicating with a base (M2 and lora radio) works. Will the alternative at the rover side work as well with only the lora radio with relevant pinout of ground, 5v and Tx (signal) soldered to the micro4.1 AIO board? Thx.