I’m looking to enhance my IMU settings and I’m pondering the best and simplest way to calibrate the inclination sensor. I’ve noticed that when the cabin tilts, the steering attempts to compensate, which it really shouldn’t. The vehicle’s geometry and antenna position are meticulously measured and stored.
I understand that the dual GPS setup is considered the holy grail and performs much better. However, I initially went with the single GPS variant and I’m not quite ready to completely overhaul my setup just yet, especially since the system is performing quite well otherwise.
If anyone has any tips, tricks, or could point me towards a helpful thread, I would greatly appreciate it.
How did you conclude the steering should not compensate when the cabin tilts? I guess you assume it should not because the tractor does not tilt? However, the GNSS receiver position changes when the cabin tilts (assuming the receiver is on the cabin roof).
This has been discussed before, the point being that neither tilt measurement is exactly correct, the sensor on the cabin or the sensor on the tractor body. I’d say the cabin tilt is better as it overcompensates and removes some of the side drift as a result. I’ve never seen dual tilt sensors to work out the absolute ground position as a combination of the cabin and tractor body tilt, with the associated dimensions.
Yesterday, I conducted seeding on plowed land. The GPS had an AB Line set. The system runs very precisely on flat ground and hardly deviates from the ideal line. However, due to plowing, the ground is not perfectly level. For instance, if the rear wheel enters a small depression on the left and the cabin tilts slightly to the left, the system immediately steers to the right as the antenna loses its position. These “hiccups” are clearly visible in the subsequent pass and unnecessarily disrupt the system. I believe the system fails to adequately detect or account for the tilt, hence the impulse to “correct”.
I had hoped for a method to better align GPS and IMU.
By dual sensors, I meant Dual Heading with 2 GPS antennas. Sorry for the misunderstanding.
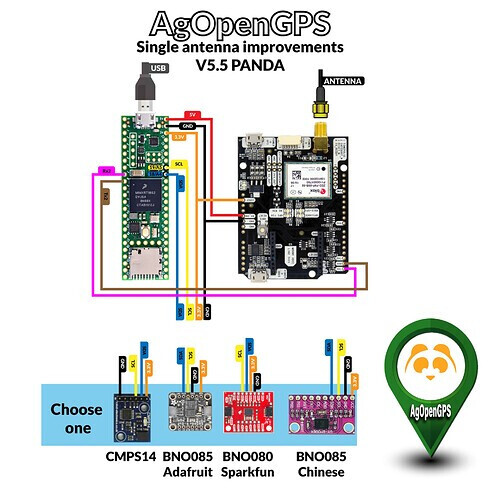
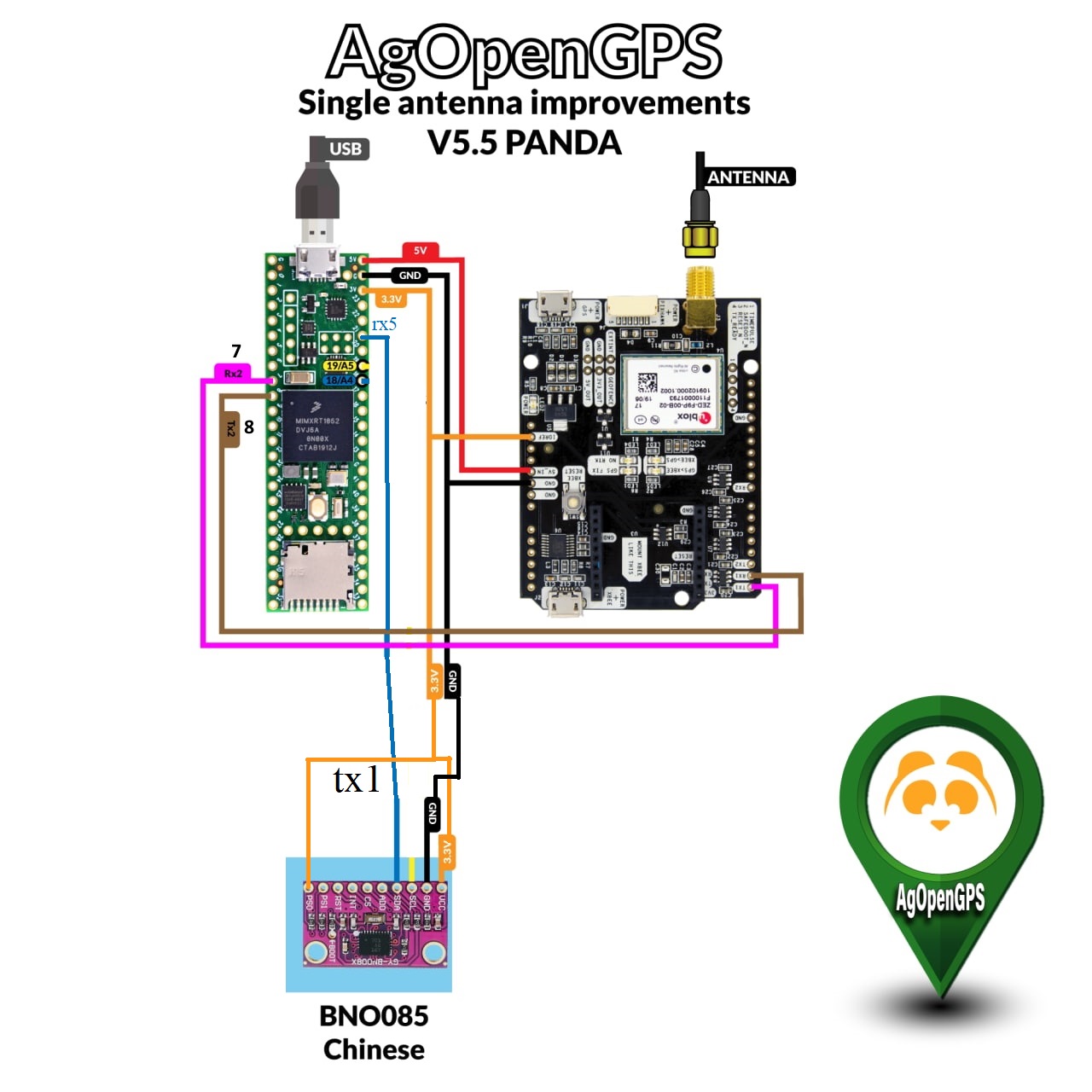
Mounting IMU on lowest spot possible. Move antenna to hood. One trick is to put smaller antenna height in aog so IMU roll has less influence on position. Roll filter should not be used with PANDA system.
Interesting, the lower the antenna, the less distance when tilting. That definitely makes sense. Putting the antenna on the hood is an option, but it contradicts the recommendations a bit. The Pure P steering mode is recommended from V5 (plus/minus), and it’s important that the antenna sits as close to the rear axle as possible.
I bought and used a pre-assembled version based on Arduino Nano, probably not a Panda.
It’s a question of trade-offs and accounting for different conditions.
In cases like you mention, where you hit a bump, the GPS position change is real, but ideally you would not react to it, because by the time the system reacts, the bump is gone and the roll has corrected.
The trade-off is, if you start on a side hill, do you want the system to delay 0.5 second, 1 second, etc? to compensate for a real position change? In this case, having filtering will create a delay in responding to a real condition that you want compensated.
I think smaller tractors are more sensitive to this than say something with duals that will help smooth out the ride. If you’re operating mainly on flat ground, then you can up the roll filter to slow down the response. If you have a lot of side hills, you have to pick.
if you have arduino Nano type board then you need roll filter. Even better would be to add panda module. Then IMU and GPS will be more in sync and no roll filter.
As @87yj say its trade-offs and accounting for different conditions. I did have antenna 300cm from rear axel. For AB line it worked great. What would happen on u turn no idea. On hood you also eliminate cab suspension. But then IMU must be mounted also on fixed frame. When RVC mode comes out then IMU can be mounted far from PCB on serial cable. No need for extra microcontroller and exposing it to outside conditions. That would look like this.
@Davidwedel I use a CMPS14 chip. It’s most likely installed correctly since it was marked for AOG by the seller and mounted in the vehicle as such. I display the inclination in the software, and that seems to be fine. No, I’m using the hardware from A. Orthner from the Autosteer CC Shop. It should be based on Arduino.
@87yj When you mention dual wheels, my Fendt 718 probably falls into the small category . I mainly operate on flat surfaces without lateral drift in the implements, and in 90% of cases, I have a level ground where the system works very well. Only in the 10% of cases, like the one described here, where I was seeding on very rough terrain, did my system show its limits.
I understand that Panda might be a better alternative, but I’m completely unmotivated to completely rebuild my system since it works very well except for the 10% of cases, and I’m satisfied with the build as well.
I was hoping there’s a procedure where I start with a base value, drive a test route, and when behavior A occurs, I move slider X to the left, and when behavior B occurs, to the right.