Hello, I tried to explain some abbreviations with quotes for my friends who are unfamiliar with these topics, please let me know my mistakes, and I added a few photos that are important to me, also I have quotes from Ardumower site for you to set up your own base station, I hope it will be useful.
GNSS AND GPS?
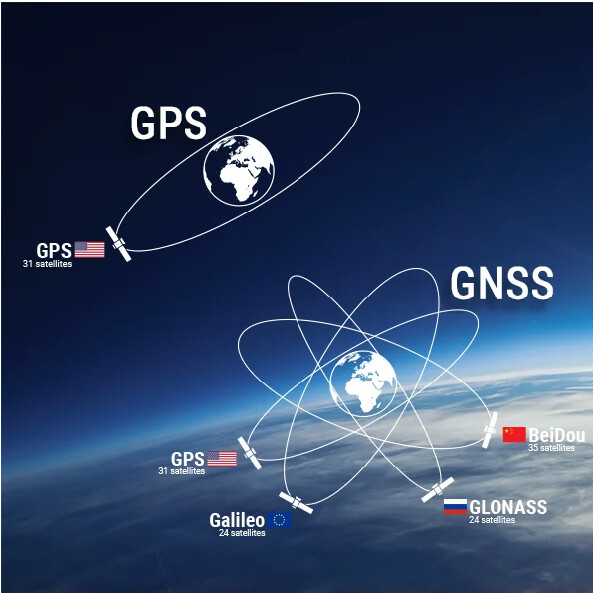
GNSS stands for Global Navigation Satellite System, and is an umbrella term that encompasses all global satellite positioning systems. This includes several constellations of satellites orbiting over the earth’s surface and continuously transmitting signals providing an autonomous geo-spatial positioning with global coverage.
The GPS constellation (developed and controlled by the USA) is still the most widely used GNSS in the world but major countries have now developed their own constellation: Glonass (Russia), Beidou (China), and Galileo (Europe) with improved accuracy
GNSS is used in collaboration with GPS systems where all GNSS receivers are compatible with GPS, but GPS receivers are not necessarily compatible with GNSS.
A GPS receiver has been designed to receive the GPS constellation only (24 satellites) when GNSS-compatible equipment can use navigational satellites from other networks (each network is controlling between 24 and 30 satellites). It is therefore recommended to use GNSS receivers for positioning and #timing applications.
NMEA
It is a simple ASCII, serial communication protocol that provides communication between many types of maritime and military electronic devices such as sonar, anemometer, spinner compass, autopilot and GPS receivers, and that defines more than one data at a time. It is controlled by the US National Naval Electronics Association. Data sentences are sent every second. Of course, at this point, a question should be asked. How long does it take to reach your GPS receiver with the time information or data sentences sent from a satellite in Earth orbit? Of course, the sent data comes to our GPS receiver after a certain journey (time). This problem was solved by incorrectly setting the time information on the satellite, that is, by taking it back 10-15 seconds. Anyway, this issue goes back to the theory of relativity.
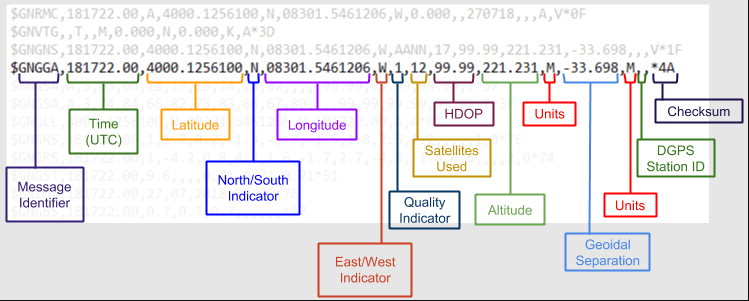
What’s in NMEA? How and where does this data come to us?
At the beginning of each sentence, we see the sentence name, that is, the title that summarizes the content of the sentence ($GPGGA).
These titles and data contents are published or revised by the US National Marine Electronics Association as mentioned above. The examples we have given belong to version 0183 of the NMEA protocol.
Örneğin, geçerli bir GPS düzeltmesi ile bir GPGGA mesajı şöyle görünebilir:
$GPGGA,155002.000,3732.7239,N,07726.9956,W,1,05,1.7,89.1,M,-33.6,M,0000*58
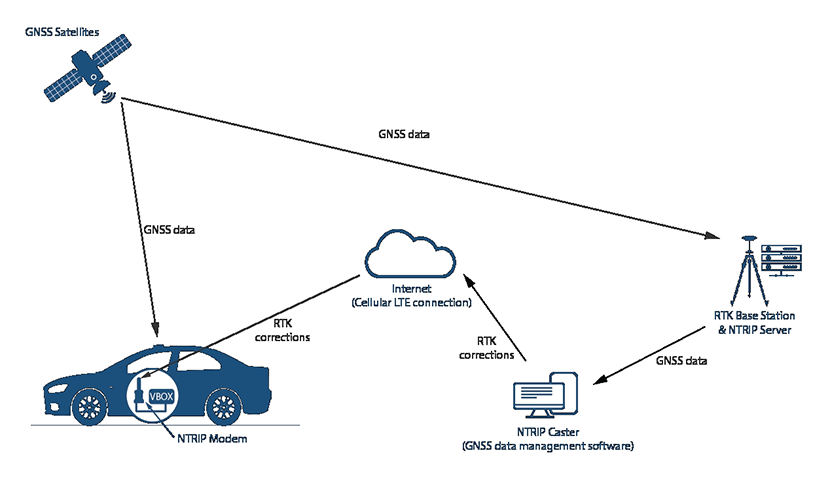
NTRIP
NTRIP, on the other hand, is the protocol for transferring the RTCM data format, that is, the network protocol of the data. It is like a standard for setting up HTTP networking for transferring different GPS data.
PVT
Time sensitive transmission of speed and location information. P=position V=Velocity t = time
SBAS
SBAS (Satellite Based Augmentation System)
SBAS uses GNSS measurements taken by accurately located reference stations deployed throughout the continent. All measured GNSS errors are transferred to a central computing center where different corrections and integrity messages are calculated. These calculations are then broadcast over the covered area using geostationary satellites that act as an augmentation or overlay to the original GNSS message.

RELPOS
Relpos means relative position. relative position. In relative positioning, one of the two respective receivers is at a known position during the session. It is basic. The aim of the study is to determine the position of the other, the rover, relative to the base.
Dilution of Precision (DOP)
The dilution of precision (DOP) is used for measuring the UNI-GR1’s position precision. DOP values describe the current strength of the satellite configuration (geometry), and the uncertainty of the data that the UNI-GR1 can collect at that moment.
Position DOP (PDOP)
This value describes how many satellites are spread evenly throughout the sky. The more the satellites directly above you and the less on the horizon, the lower the PDOP value is.
Horizontal DOP (HDOP)
The effect of the DOP on the horizontal position value. The more good visible satellites low in the sky, the better the HDOP and the horizontal position (Latitude and Longitude) are.
Vertical DOP (VDOP)
The effect of the DOP on the vertical position value. The more good visible satellites low in the sky, the better the VDOP and the vertical position (Altitude) are.
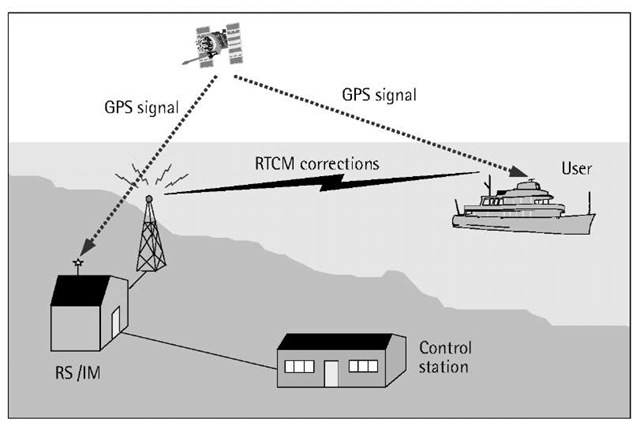
RTCM
In order to improve the accuracy and reliability of real-time positioning, real-time differential GPS technology is widely used in current surveying operations. The differential system consists of the base station, data link, and user (rover). Among them, the data link plays a key role in the system, and whether it is effective and reliable determines whether the differential system is reliable and effective. The differential protocol is an important part of the data chain. Any data information has its own way of being generated, stored and exchanged. This way of existence is the protocol. To facilitate the exchange and transmission of information, the need for a unified format protocol emerges as the times require, resulting in a standard protocol used by differential systems around the world. Currently, the most commonly used differential message formats are RTCM SC-104 and CMR. Here we focus on RTCM.
In November 1983, the Radio Technology Commission for Maritime Services (RTCM for short) established the SC-104 special committee for the global promotion of differential GPS services to formulate various data format standards.
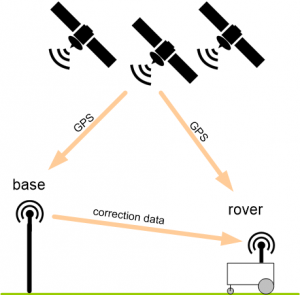
Your own RTK base
This is the recommended installation method as it also will give you RTK fix solution results in cloudy weather conditions . Your own RTK base should be located max. 8 km away from your mowing area . The GPS antenna should have a clear sky view and is ideally mounted at a high (and steady) position. Using long-range (LR) wireless radio-frequency (RF) modules, the GPS correction signal is transmitted to the robot (it’s a one way transmission). Multiple robots can be operated by a single RTK base. Using long-range radio modules (e.g. 868 Mhz) is preferred over standard 2.4 Ghz radio modules as they better penetrate buildings, trees etc.
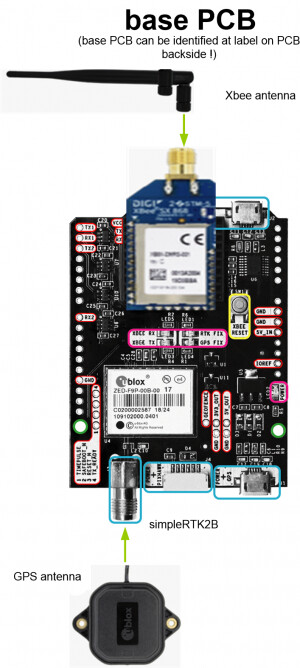
- Make sure you have the simpleRTK2B module marked as 'BASE’ in your hands (look at simpleRTK2B PCB label at backside!)
- Connect Xbee LongRange dipole antenna
- Connect GPS multifrequency patch antenna. NOTE: antenna cable is very sensitive, never bend the antenna cable! Minimum bend radius: 5cm!
- Connect a USB 5v power supply to the USB port marked as 'POWER+GPS’
- Install the GPS base antenna - it should have clear view to the sky in all directions without any obstacles. For best results install GPS antenna on the roof. Alternatively, if you have an open area (without trees and other obstacles), you can install the base antenna on a tripod.
- Improving position solution robustness: for robust position solutions (FIX), you will need to install a (conductive) ground plane (15x15cm, make it round if possible) for the patch antenna. Install the patch antenna on top of it like shown below. This will give you most robust position results.

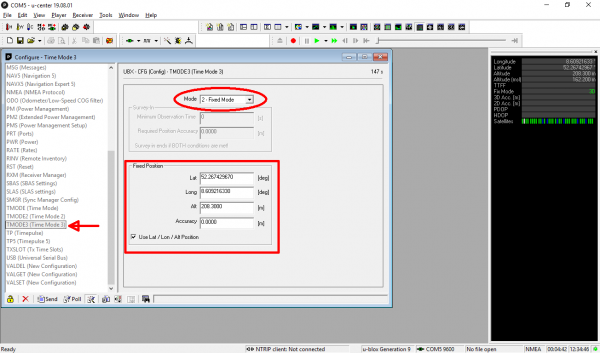
- Choose ‘View->Configuration View’. Choose configuration message 'TMOD3(Time mode 3)’ and choose:
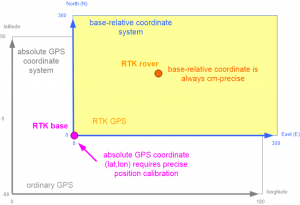
- Mode '1 - Survey-In’ (90s/5m precision) if you use ‘relative coordinates’ in the App (recommended). It’s ok to choose such a worse precision as this is related to absolute GPS world coordinates only and we don’t use this (unprecise) absolute world coordinate when using (cm-precise) relative base coordinates.
- Mode '2 - Fixed Mode’ if you used ‘absolute coordinates’ in the App (not recommended). Enter your base coordinates as shown in the image. NOTE: You can find out your precise bases coordinates using the 'Survey-In’ mode which will take several hours to get down to a precise position. NOTE: You can run the survey-in and compare the GPS solution coordinates (latitude and longitude) from hour to hour. If they do not change anymore, your base coordinates are precise.
- Click on ‘Send’. Your base should get a '3D’ position solution (verify this!).
- From the u-Center menu, choose ‘View->Configuration’, choose configuration message ‘CFG (Configuration)’ and click on ‘Send’ to make the configuration in the base persistent when the rover module is powered off. Do not forget to save the configuration (Receiver → Action → Save Config).
- Tip if using multiple XBee LR kits (base and rover pairs) within a 10km area: The XBee LR kits are all configured with the same network ID. So if one rover is in the range of two base stations, there’s going to be cross talk and the rovers will start doing funny things. For the XLR kits are configured with a unique ID per kit, to avoid the situation. Nevertheless the LR kits only really work with line of sight, if the base station antenna is not mounted in the top of the house and can see all the neighbourhood, is quite unlikely that the arrive more far than a couple of houses away.
You have 2 options to solve this problem:
- Configure each pair in unicast mode so each base station only talks to specified rover.
- Change the network ID for each pair (PAN ID).