Hi everyone, my name is Andrew. I’m a dairy farmer in middle-eastern Ontario Canada. I first found out about Agopengps about 4 years ago at the time the agrabot video was published on Brian’s channel. AgraBot the Autonomous Tractor - YouTube
It was my understanding at the time, that he used an Arduino for the IMU and kinda wired everything together manually. I thought, this is pretty cool, but I don’t have time for it right now, I’ll come back to this later when I have time. (And we bought an outback rebel gps for our sprayer at the time instead)
Since then, we have bought a tile machine and I have become much more familiar with GPS in general. For our tiler I have set up my own RTK base using an F9p from sparkfun and SNIP. As a rover on the machine I use another F9p ( sparkfun RTK surveyor kit) and it works very well with Leferbure design ntrip client app. ( Premium features for grade control).
When I purchased the GPS modules,I remembered AOG, and I bought 2 spare units so that I could use one for tractor guidance experiments in the future.
So now I am at the point where I would like to dive into Agopengps. I have a Panasonic toughbook CF-31 already. But it seems like the state of the “system” is in an entirely different place where it was the last time I was here.
I realize this is a community project and the documentation on community projects is often not the greatest. I would really like to figure out what is going on here, without having to read back the last 6 years of history in development of the software and hardware.
So I’ll try and guess at what is going on and maybe someone can point out my misconceptions or poor assumptions.
Firstly, it seems that the microcontroller has evolved from an 8bit Arduino to a teensy 4.1, in order to use the Ethernet port to communicate with the PC. ( Is the Arduino/serial method no longer supported?).
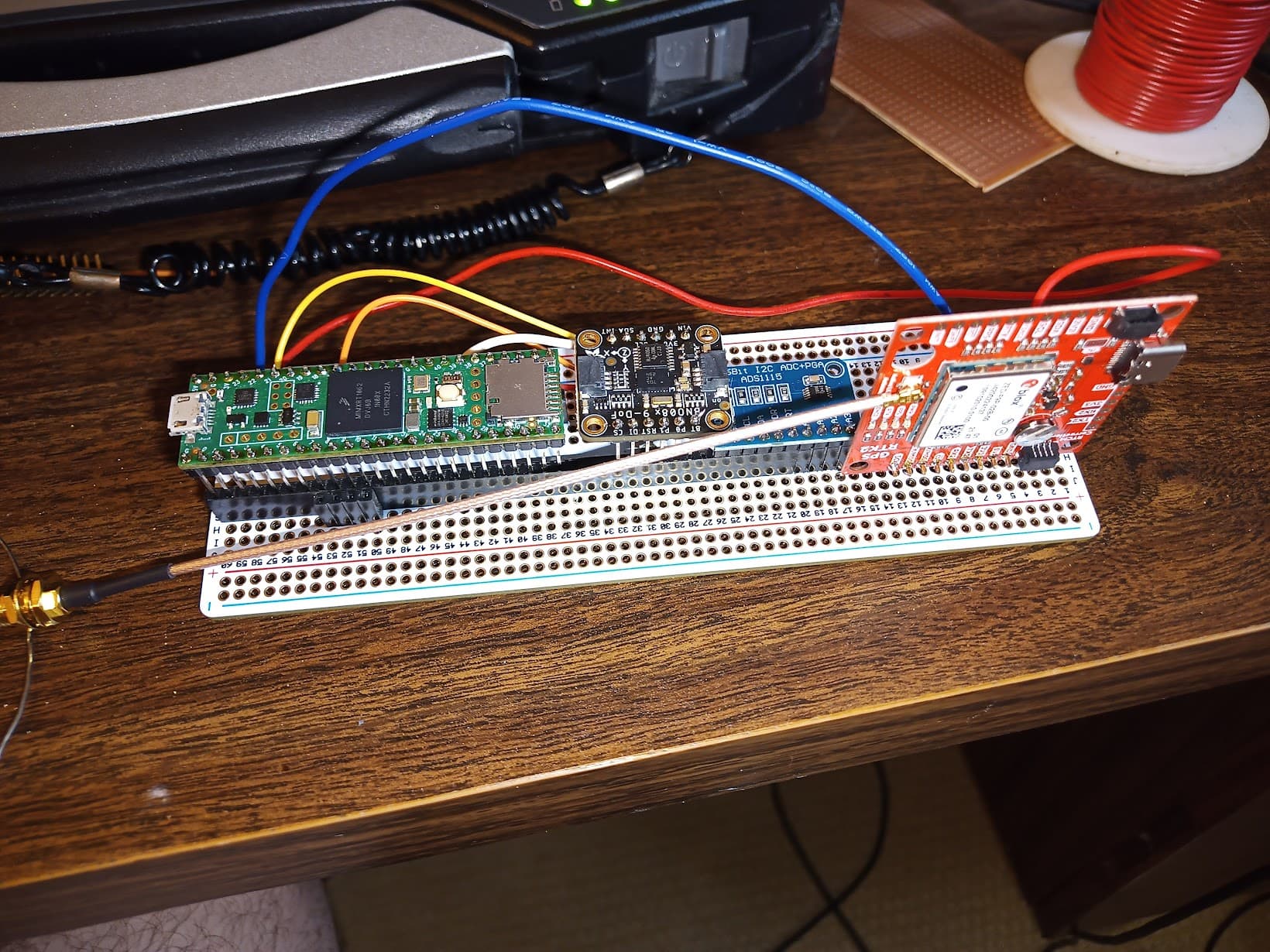
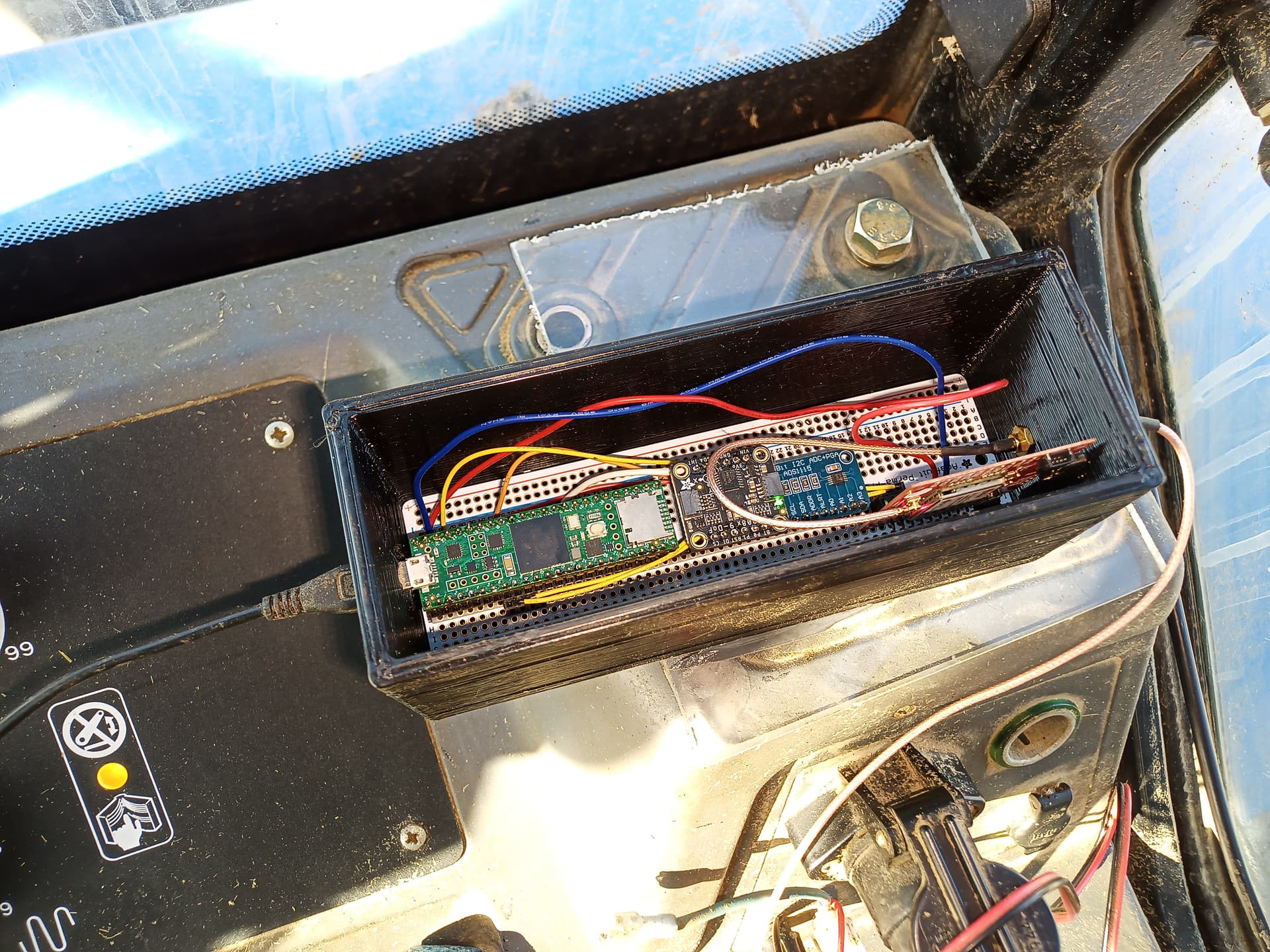
Second. I see a lot of mentions of “the PCB” including all the relevant files to order one. I haven’t dug in and actually looked at the Gerbers. But what I am surmising is “the PCB” provides a place to plug in the IMU, the gps module (or two) and the microcontroller. Maybe provides a power supply too? It seems to me the “standards” PCB expects the ardusimple F9P board, so my sparkfun F9P would not slot in. I suppose wheel angle sensor also would plug into the PCB somewhere.
Third, the community has settled on one specific IMU module from adafruit.? I’m not sure which one it is, but I’m pretty sure I don’t have it. I do have an MPU6050 though, which I think maybe the original project used?
So, if I wanted to get started with Agopengps today, knowing the GPS I have is not the one that is expected, is it still worth getting the standard PCB? Can I wire this up on a breadboard? Is atmega hardware still supported?( I have a lot of Arduinos, no teensy) (or maybe ESP32?)
If I do buy a teensy, is there documentation of what needs to go to each pin, or do I have to reverse engineer the Gerbers ? (And which IMU do I need, or will my 6050 work)
Sorry for the long post, just trying to get my bearings here, I’ve been powered off so long my magnometer needs calibrated, some might say.
Cheers, and thanks for making so much progress in capability while I wasn’t looking. But curse you for making it so complicated! (Kidding)