GitHub - chriskinal/AOG_Teensy_v4_1 is this the right code to try dual antenna on the teensy ?
and do u config the reciever trough serial terminal ?
I have Topgnss um982 , and if i configure it through uprecise , it reverts back to previuos setings after power off
I have been running this one.
After you configure the UM982 you have to enter the “saveconfig” command to save the configuration into NVRAM.
My first post in this thread has the latest UM982 Command Reference manual. “saveconfig” and all the rest of the configuration commands are in that manual.
So the steps i did after unpacking UM982 was
- updated the software (file from this forum) for mpp enable.
2 . Entered these commands
unlog
unlogall
MODE ROVER SURVEY
CONFIG MMP ENABLE
CONFIG RTK RELIABILITY 4
config HEADING TRACTOR
CONFIG HEADING RELIABILITY 3
config HEADING OFFSET 90.0
CONFIG RTCMB1CB2A ENABLE
CONFIG SBAS DISABLE
CONFIG COM2 460800
CONFIG COM3 460800
Gpgga com2 0.1
Gpvtg com2 0.1
GpHPR com2 0.1
saveconfig - Uploaded teensy software from your link . and I connected teensy to COM2 of UM .
so im not getting any heading info , what did i miss ? or its only single antenna for now ?
Do you have an RTK Fix? Is the RTK Fix light lit? Sounds like you have position and roll just not heading. Try turning down heading reliability. “config heading reliability” Try 1 or 2.
Also, if you have good antenna placement (good ground plane), you can disable MMP. I had a test setup with a marginal antenna placement and MMP helped. When I moved the antennas to a clear view of the sky, I did not need MMP. It did reduce signal strength by a dB or to.
UM982 defaults to dual antenna which is one major plus since you only need one board versus 2 with the F9P. The UM982 board is less costly than a single F9P as well.
I only have Float at best and its jumping around between DGPS and float . Im going to try your sugested settings , and tommorow im going to perfom open field test . I noticed that f9p captures gps signal when antenna is indoors placed close to a window in 5 minutes , and the UM takes half an hour or so .
Even after hours I wasn’t able to compile the Teensy code. Neither with Arduino version 1.8.18 nor with the very latest version 2.2.1. The hex file in the Ortner appears to be very old based on the date it was created. Can you please renew the hex file? It is then very easy to program the Teensy. Thank you very much for your work
It may just happen that you get enough sats when testing f9p, and in other time those sats disappear under horizon, so sometimes you dont have enough sats to get position or fix next to window. Thats why GNSS receivers are tested in clear view of sky. Also enable all constalations on your RTK base.
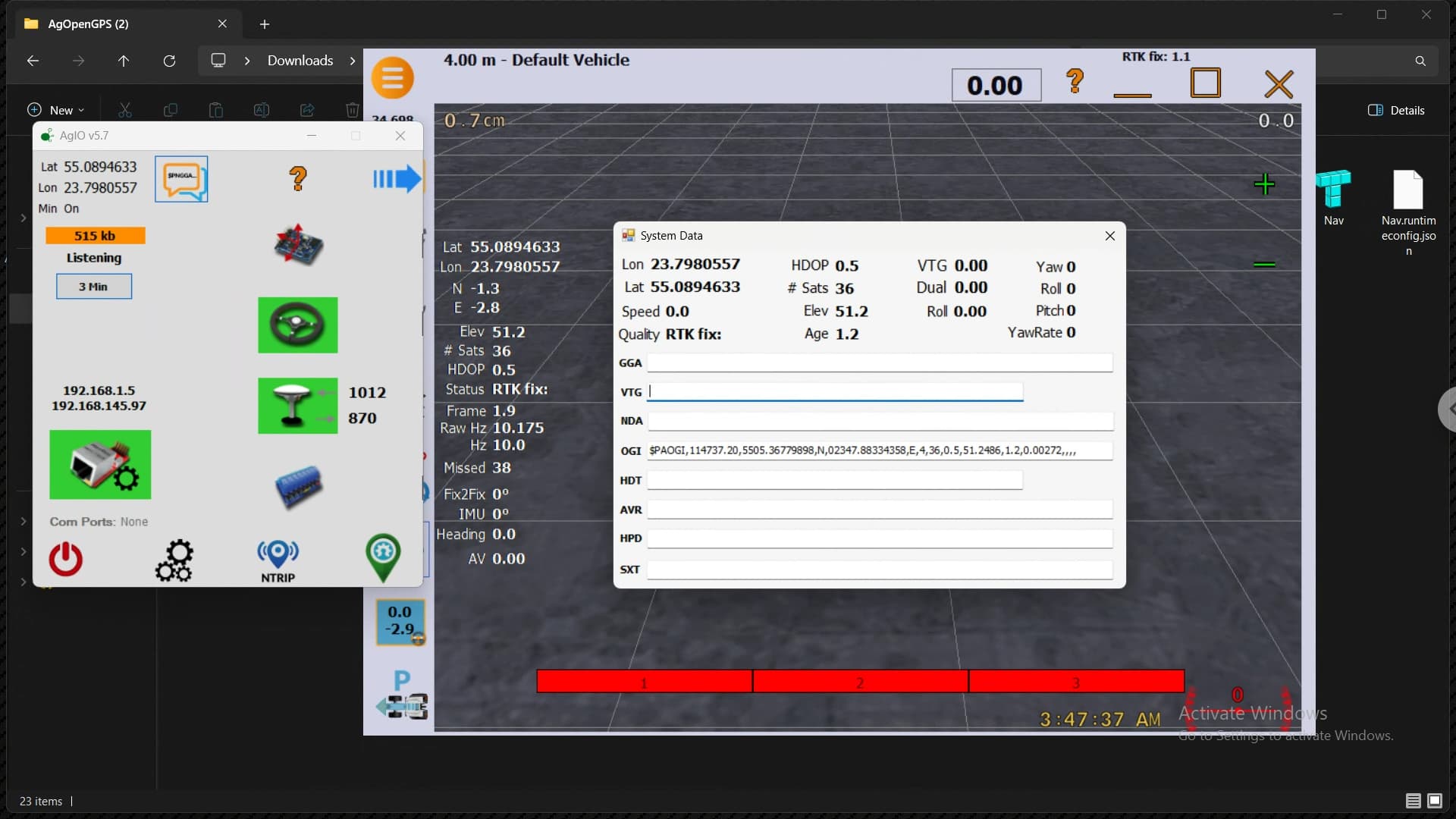
So i got my setup outside , Got my rtk fix ( turns out i was using wrong corection) , but still no roll or heading data , when moving one of the antennas around . any idea what steps did i miss ?
and do u need to specify antena to antena distance in UM config ? and do u need to config AOG to dual antena , and select dual as heading ?
use teensy 1.72 board lib . no problems compiling here
Seems like the two fields containing head and roll are not populated.
You compiled this version? https://github.com/chriskinal/AgOpenGPS_Boards/tree/master/TeensyModules/V4.1/Firmware/Autosteer_gps_teensy_v4_1
The hex file in that directory is the original one from farmerbriant since this is a fork of his repo. I am going to delete from my fork to eliminate confusion.
Here is my current working config, mode and logging.
config
$command,config,response: OK54
$CONFIG,ANTENNA,CONFIG ANTENNA POWERON7A
$CONFIG,NMEAVERSION,CONFIG NMEAVERSION V41047
$CONFIG,RTK,CONFIG RTK TIMEOUT 60069
$CONFIG,RTK,CONFIG RTK RELIABILITY 3 176
$CONFIG,PPP,CONFIG PPP TIMEOUT 3006C
$CONFIG,HEADING2,CONFIG HEADING2 FIXLENGTH6F
$CONFIG,HEADING,CONFIG HEADING OFFSET 90.0 0.010
$CONFIG,HEADING,CONFIG HEADING RELIABILITY 064
$CONFIG,HEADING,CONFIG HEADING TRACTOR69
$CONFIG,HEADING,CONFIG HEADING LENGTH 0.00 0.0038
$CONFIG,SMOOTH,CONFIG SMOOTH HEADING 104D
$CONFIG,UNDULATION,CONFIG UNDULATION AUTO2B
$CONFIG,DGPS,CONFIG DGPS TIMEOUT 3006C
$CONFIG,RTCMB1CB2A,CONFIG RTCMB1CB2A ENABLE25
$CONFIG,ANTENNADELTAHEN,CONFIG ANTENNADELTAHEN 0.0000 0.0000 0.00003A
$CONFIG,PPS,CONFIG PPS ENABLE GPS POSITIVE 500000 1000 0 06E
$CONFIG,SIGNALGROUP,CONFIG SIGNALGROUP 4 505
$CONFIG,ANTIJAM,CONFIG ANTIJAM AUTO2B
$CONFIG,AGNSS,CONFIG AGNSS DISABLE70
$CONFIG,COM1,CONFIG COM1 4608002E
$CONFIG,COM2,CONFIG COM2 4608002E
$CONFIG,COM3,CONFIG COM3 4608002E
mode
$command,mode,response: OK5D
#MODE,75,GPS,FINE,2291,564180100,0,0,18,35;MODE ROVER AUTOMOTIVE,3D
uniloglist
$command,uniloglist,response: OK4A
#UNILOGLIST,76,GPS,FINE,2291,564190000,0,0,18,36;
< 3
< GPHPR COM1 0.1
< GPVTG COM1 0.1
< GPGGA COM1 0.1
Here is a compiled version of my current Alpha testing. This is all still a work in progress and definately will change.
teensy_um982_alpha.hex.zip (356.0 KB)
$CONFIG,HEADING,CONFIG HEADING RELIABILITY 165
I cant set it to zero . did u did another software update ?
?
my version
#VERSION,97,GPS,UNKNOWN,1,1537000,0,0,18,46;UM982,R4.10Build9984,HRPT00-S10C-P,2310415000012-LR23A1224558373,ff3b3b97dda86efc,2023/06/012ae33619
my mode , but theres no antena connected now.
#MODE,97,GPS,UNKNOWN,1,1603400,0,0,18,47;MODE ROVER AUTOMOTIVE,*4E
#UNILOGLIST,97,GPS,UNKNOWN,1,1683700,0,0,18,97;
< 6
< GPGGA COM2 0.1
< GNGGA COM2 1
< GNRMC COM2 1
< GPHDT COM2 1
< GPVTG COM2 0.1
< GPHPR COM2 0.1
I got more messages , but i cant unlog them , and make them only 3.
I am at the same software version as you mentioned.
Logging commands only affect the com port you are currently connected to unless you specify a different come port. To change the logging on a port you are not connected to, you must specify the port. Eg. I am connected to com1, unlogall com2 will turn of all logging on com2.
When you connect with Uprecise, it issues logging commands to the port you are connecting to automatically.
Poor signal reception will cause unpredictable results. RTK GNSS receiver antennas need a clear view of the sky. Uprecise shows signal strength in the Tracking Status window. Optimal RTK performance requires an average signal strength at or above 40. The more constellations at or above this signal strength the better. Antennas like the Ublox ANN-MB require a 100 - 150 mm ground plane for best performance.
I was finally succesful , turns out the BNO has to be present on the steer board , for dual antenna to work.
why does the AOG jumps around whith 20 hz gga update rate ? is it just the windows software limit ?
Are you sure the system isn’t getting heading and roll from the BNO? The dual setup eliminates the need for the BNO. The boards I am testing with have the BNO socket empty. The AOG firmware code will use the BNO if it is not able to get the heading and roll data from the GPS.
I tried 20Hz as well and found the AOG GUI Raw Hz reading showed 20 but the Hz reading showed 11 - 12 Hz. I do not know enough about the AOG GUI application to explain.
What is jumping around? Heading? Roll? The tractor icon on the GUI?
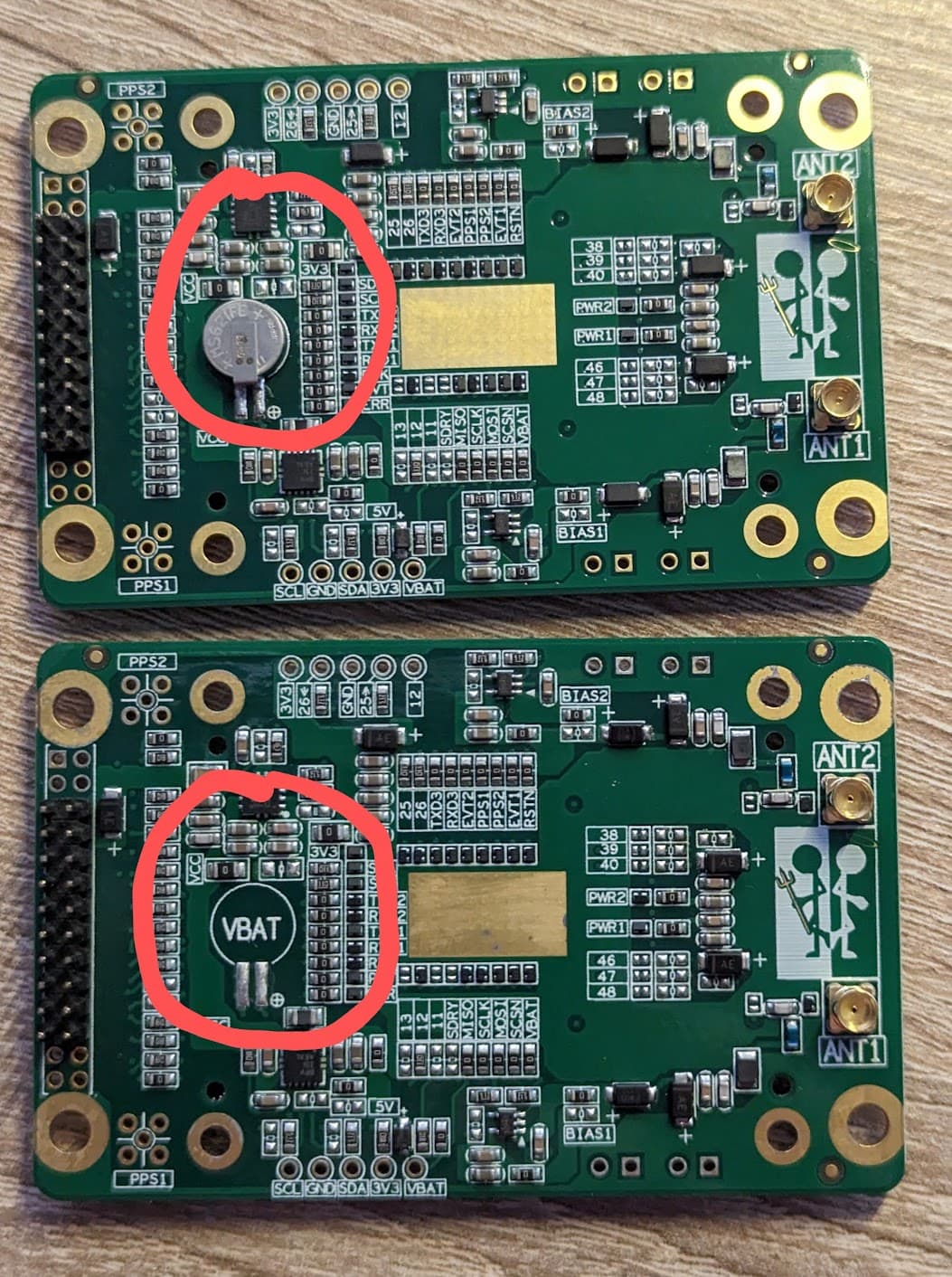
It is not required but the UM982 will have to reacquire some satellite data on each power up. This can cause the time to first fix to increase. It is not ideal. I have seen some advertised on Aliexpress without the battery. I avoid purchasing them.
I use the seller in this post for my board purchases.
Cn you post a picture of the other side of both boards?
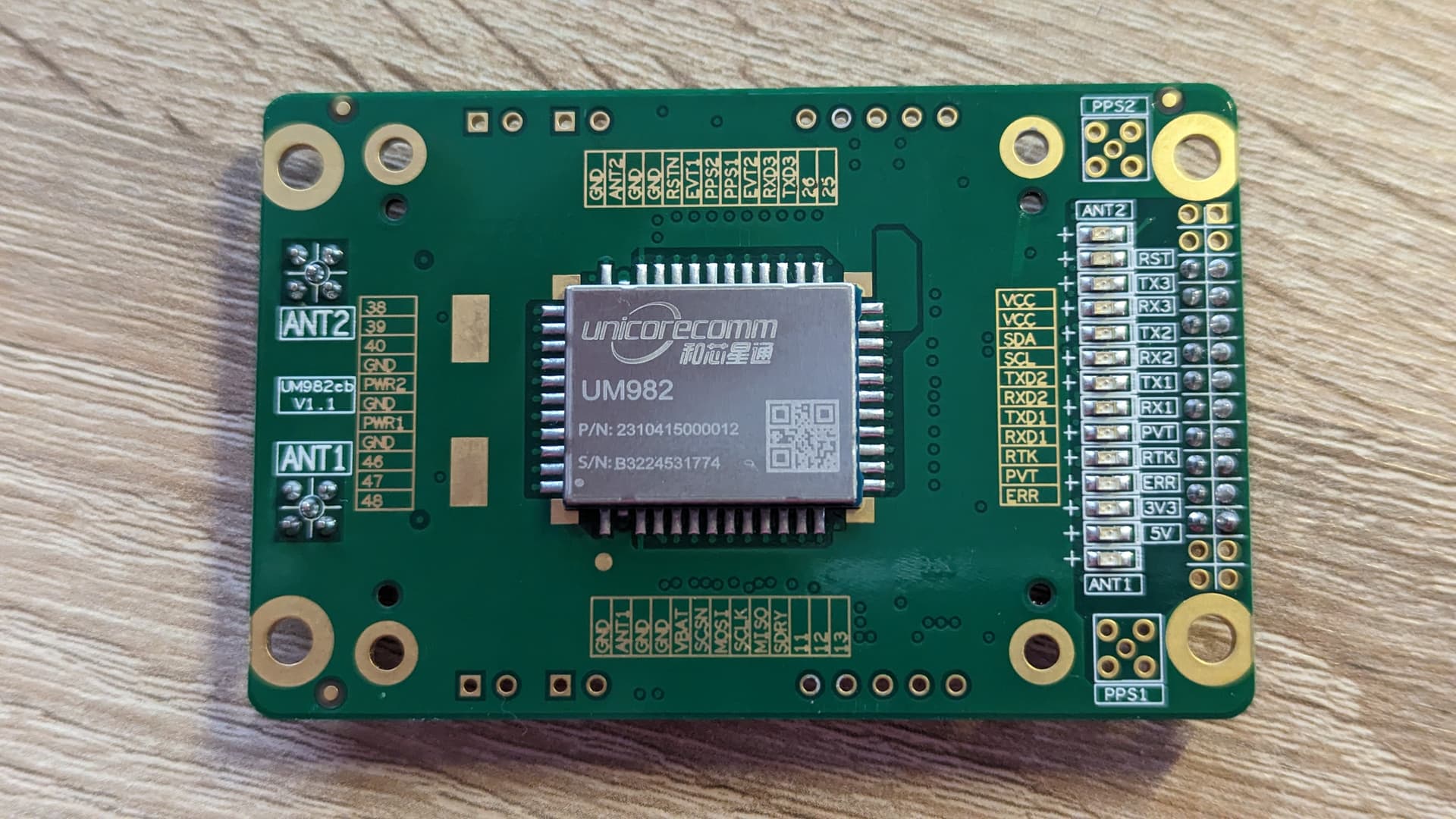
Otherwise I can’t tell any difference.
I loaded the hex onto the Teensy.
My reception is good and I have a fix straight away. but I still have the problem that I don’t have any roll and heading data
What does your board config look like? Post outputs from the config, mode, version and uniloglist commands and I will try to help.