I have been trying to bench-test my Kaupoi board today, and have run into issues with the IMU not appearing to be recognised. I was hoping it might be something simple I have missed perhaps?
Board is Kaupoi Mod V4.1
BNO08x
Cytron MD13S
Arduino Nano via UDP
I am running AOG v5.7.1, and have flashed the latest “Autosteer_UDP_v571.ino” onto the arduino
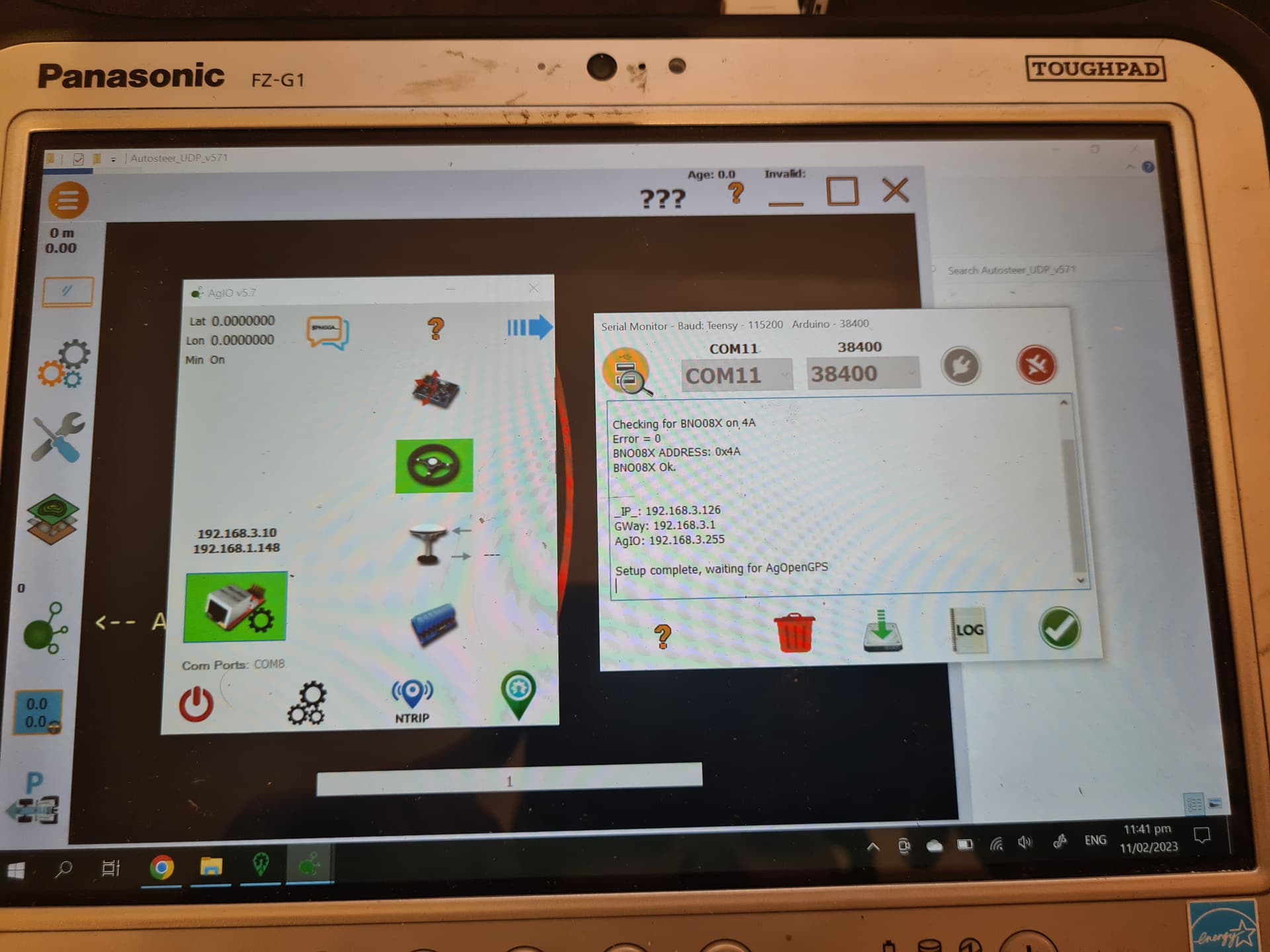
If I plug the arduino in via USB I can get the serial monitor to recognise the IMU, however there is still no pitch/roll/yaw data displayed whether I try UDP or serial.
As in the photo you can see AOG is recognising the steer module via UDP just fine, but no IMU
Try to go trough the whole wizard in steer/tractor setup.
There might be one setting that doesn’t come over automatically.
Pniels had problem to zero the roll, ( roll didn’t show at all) he solved it by doing the wizard.
I have seen that as well. I don’t think it is normal, happened after an update to 5.7 UDP.
Updated to 5.71 so thought it was related to the ino.
Haven’t been able to recreate the problem, but have seen another user mention same problem.
So maybe it is about the upstart of the bno instead.