As the title says, one direction is spot on the whole way and the other way will drift and randomly correct back to zero on a whim.
If I disengage then re-engage it behaves for a little bit then goes back to loose Autosteer. To be clear, it’s still moving the steering wheel, it’s just complacent when it’s off of actual centerline.
I tried messing with all of those, all with very clear impacts. This seems unrelated, it’ll drift off slowly while engaged and either spontaneously correct, or if I disable and re-engage it’ll lock right on zero until it gets lazy again.
One direction is spot on perfect, the other way is lazy but corrects back once I yell at it.
The PWM values seem similar in both directions, it’s like it thinks it’s on 0 cause it steers back and forth but it’s simply drifting. Again, this quits once I disengage and re-engage auto steer, then gradually gets lazy again.
RTK is rock solid, I have my alarm turned on and haven’t heard it once. I don’t believe it’s the GNSS lock because it’s always spot on in once direction.
What I don’t understand is: Why doesn’t the system always hunt for zero even if there’s anything wrong with any sensor along the way…?
I’ll have to try this! I don’t think I’ve ever gotten my WAS centered very good. I’ve never noticed it being lazy one way or the other but I usually have to use an offset in the software to get my spacing perfect from pass to pass. Would the WAS configuration be what causes that as well?
Looks like is not good enough. As asked one day ago, tell all your settings!
Problems could be cpd, or max steer angle, or min pwm, or proportional, or …
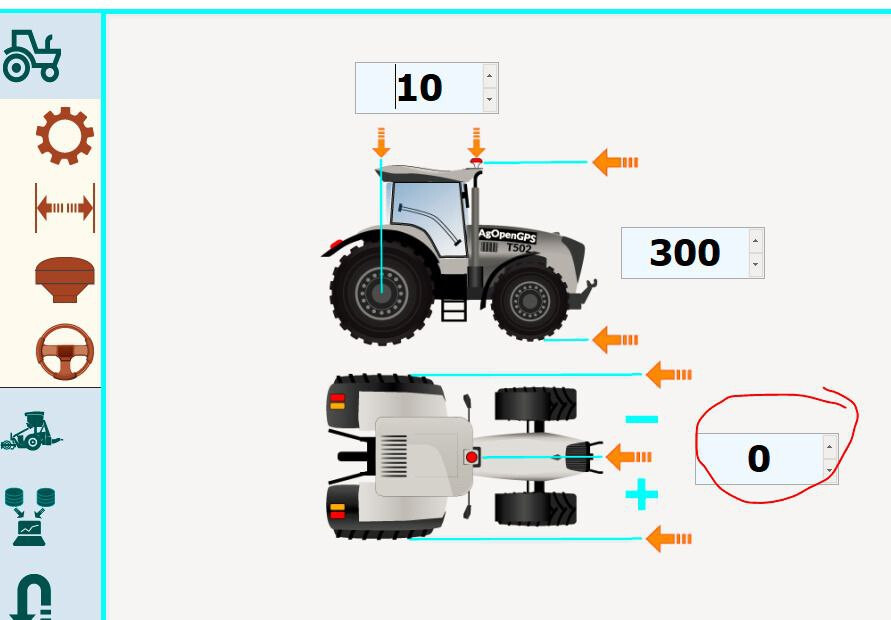
Expand the autosteer config window both to right and down. Now you see drive function.
Test and make sure wheels steer in correct direction, and WAS show correct direction. Consult the aog manual for more info.
I may have found the issue but won’t know until we combine later today. I will also post all of my settings both before and after so others may find this someday.
I’ll have to re-do the steer wizard so I have a couple of questions before hand so I know I’m doing it right when the time comes.
I cannot see the angle of the wheels when setting CPD because it’s on a combine, is there a different way I can get accurate results? Can I simply turn the wheel so my WAS shows 20 degrees to the right to set CPD, then turn until it shows 20 degrees to the left for Ackermann?
Does it matter if the WAS sensor is on the left wheel? I ask because Brian mentions the Ackermann is adjusting the left turn in one of his videos.
You have to go out and see in real life if 20 degree is 20 on the wheel
You should also make the full/max steer angle fit at both sides( can be adjusted at second side by Ackerman value/percentage.
That way wheel motor stop running just before max steer angle
Interesting, it is centered on the cab but I found about a 6-7 inch offset made things line up good. Any idea what the reason is that some of them need an offset?