I’m trying to get a fix to my rover but to no avail
I have setup my own base station using Stefal’s RTKBase and a Raspberry Pi connected to F9P using USB, uploading to rtk2go. When I open AgIO or U center I can see the rtcm messages, but in AgOpenGPS it says GPS Single. I have tried getting the tractor outside of the shed and even connecting to 2 other base stations which are about 95km away from me and still no fix, not even FLOAT.
If your F9P is on USB, then UDP can’t reach it.
But set IP correct for all devices and UDP should work.
You can even concentrate on the panda with F9P IP, and leave out the autosteer PCB, then AOG can still show rtk fix
When I use UDP the panda board and PCBv2 work but in AgOpen I can’t get a fix, also I have to set them in a different subnets because if they are in the same subnet my steering module disconnects.
Must be same IP
I use an old router in tractor, just not its wifi part. Only the 3 ethernet cables to router.
A switch can work as well.
Do you mean the number after the .1 or .5 in the IP?
That one normally set itself, by the router. I think it is called DHCP
Maybe computer can also deliver DHCP via a switch?
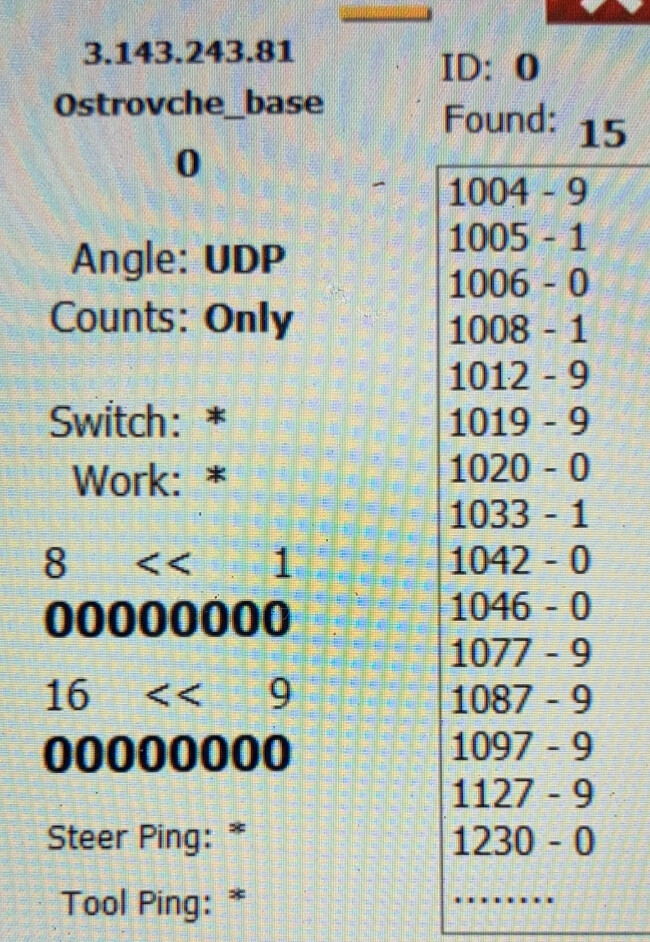
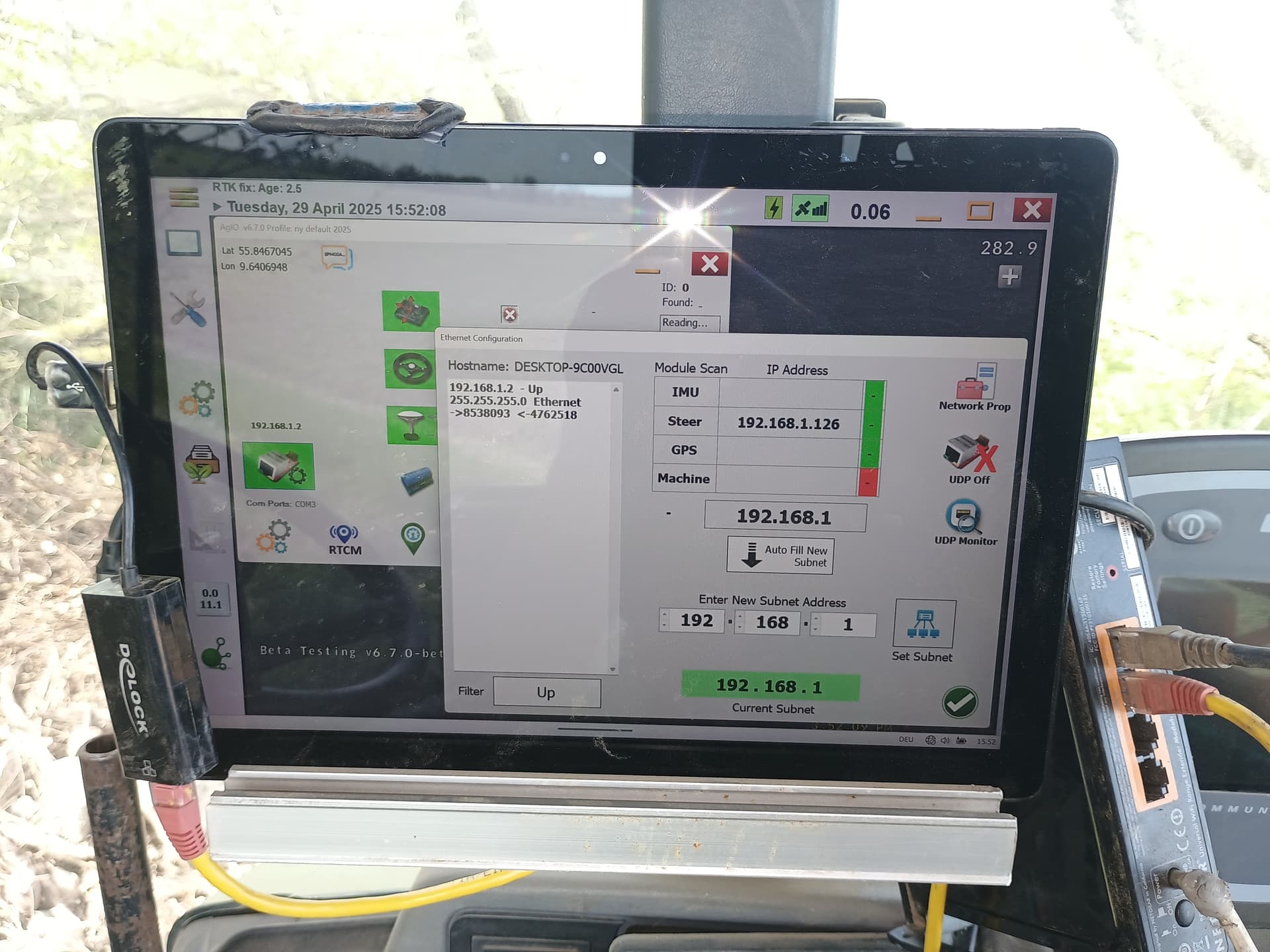
@Meg could you send a picture of your ethernet configuration page? And how do you have the modules connected to the tablet? Over a router/switch? Or does your tablet have multiple ethernet ports?
Not at the tractor with Panda right now.
Did you watch the setup video, network from 9.49.
My tablets have no ethernet, so use USB to ethernet, with only one eth at the end of USB.
So I use router as “middleman”
Also at the moment I use lefebure on phone to Bluetooth on F9P. But did use phone as hotspot when running AOG 4.x
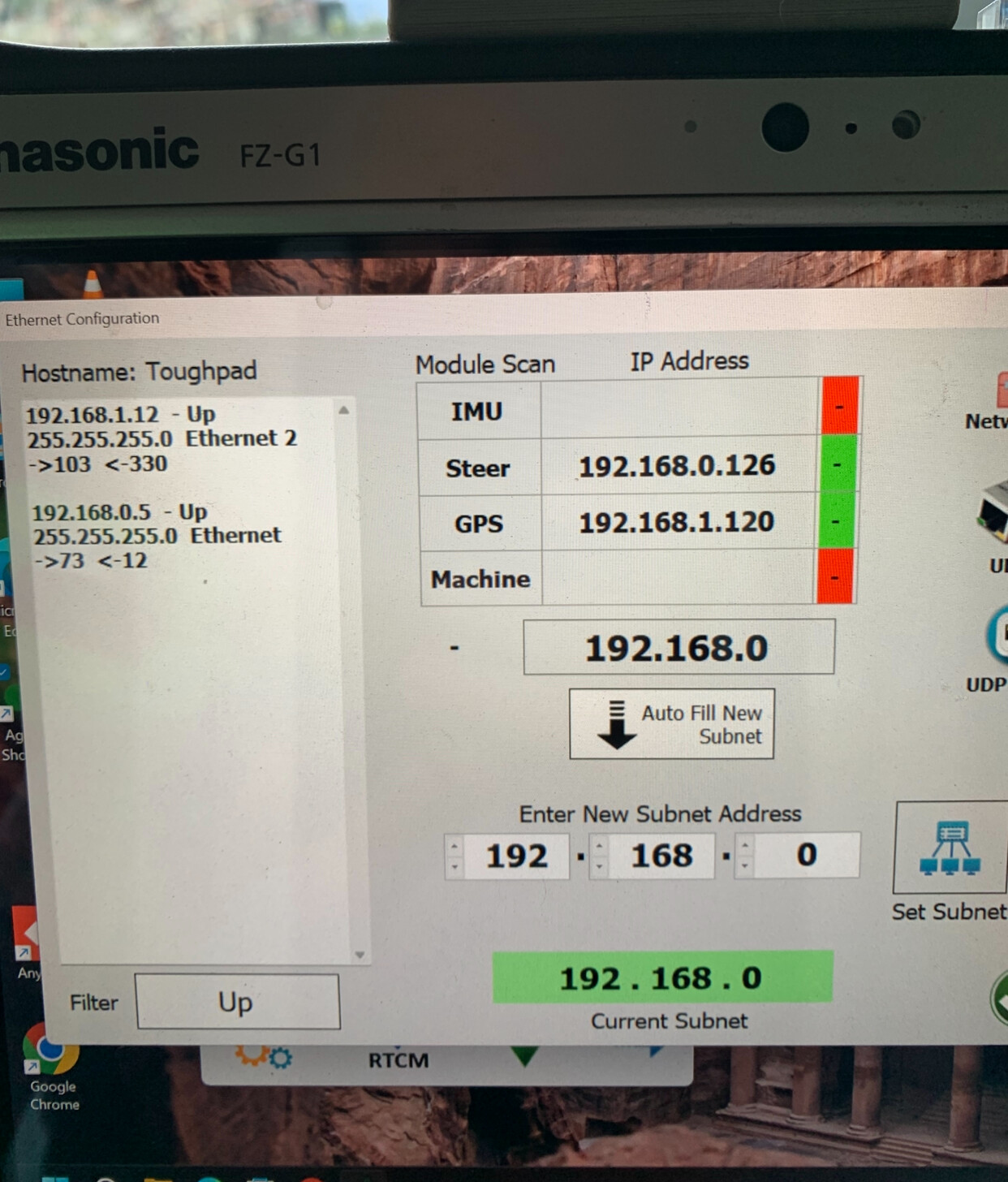
For some reason, AgIO will receive GPS even if your subnet is incorrect. This is why you are receiving GPS.
Of course, because your Steer board is set to the correct subnet, it works.
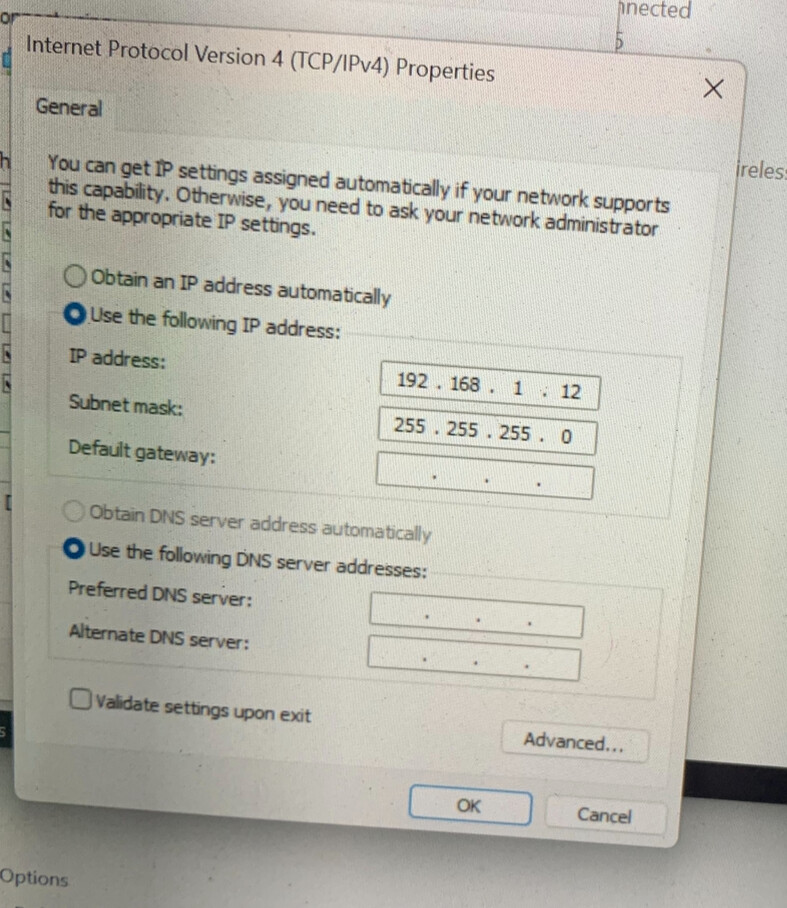
But AgIO is sending the corrections to the subnet you have set (192.168.0.x), and your GPS board is on 192.168.1.x . So it never receives the corrections. This is also why your IMU isn’t showing up as connected.
The fix is going to be buying a router or ethernet switch and plugging both devices and your tablet into that. Then everything will work like it should.
Maybe the INO for your teensy, haven’t got the new delay for IMU in it?
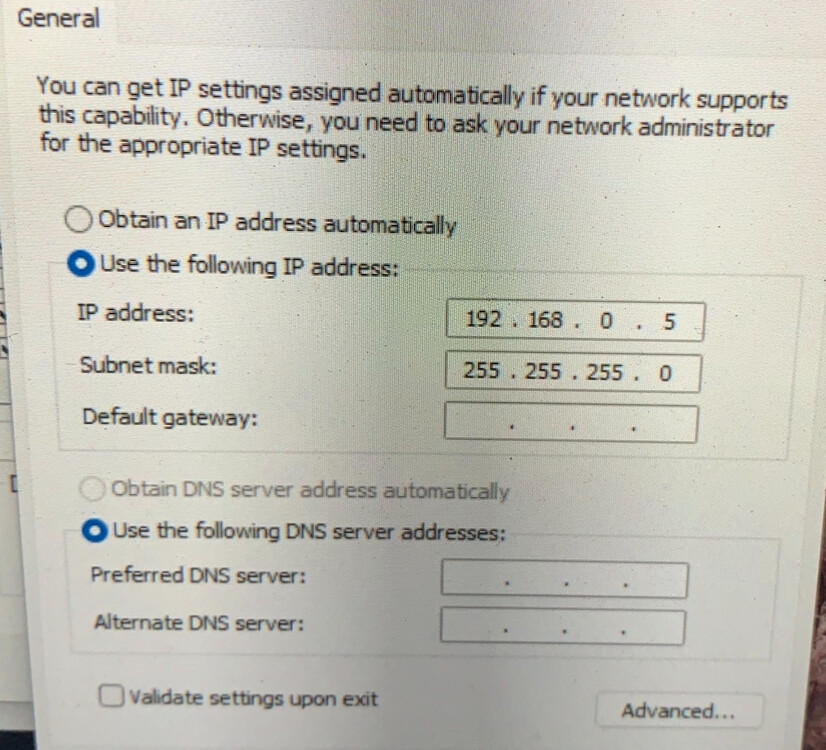
I have never fidled with those IP settings in windows, but I would use .1.5 and .1.12 if possible. Not the .0.5
IP MUST be same, else no talking from AOG.
So i setup steering board and Panda in same subnets 192.168.0.x but when I connect them both with the ethernet cable my autosteer board disconnects(lights red in AgIO). When I connect just one of them (either PCBv2 or Panda) it lights green. That is the reason I changed the IP addresses of the two ethernet adapters in control panel.
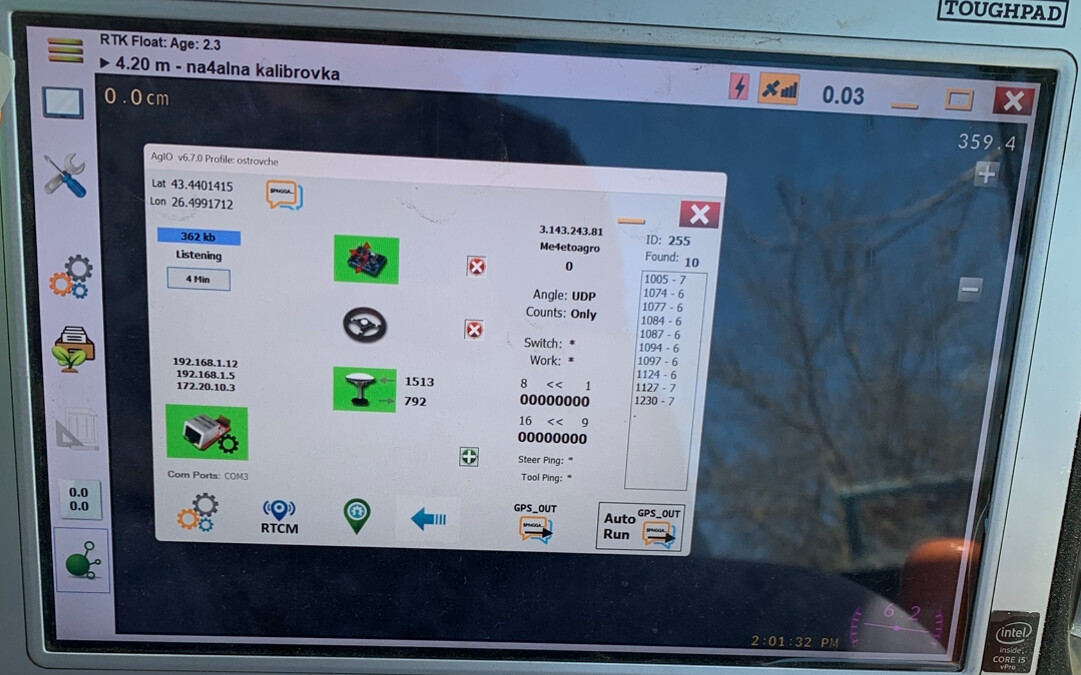
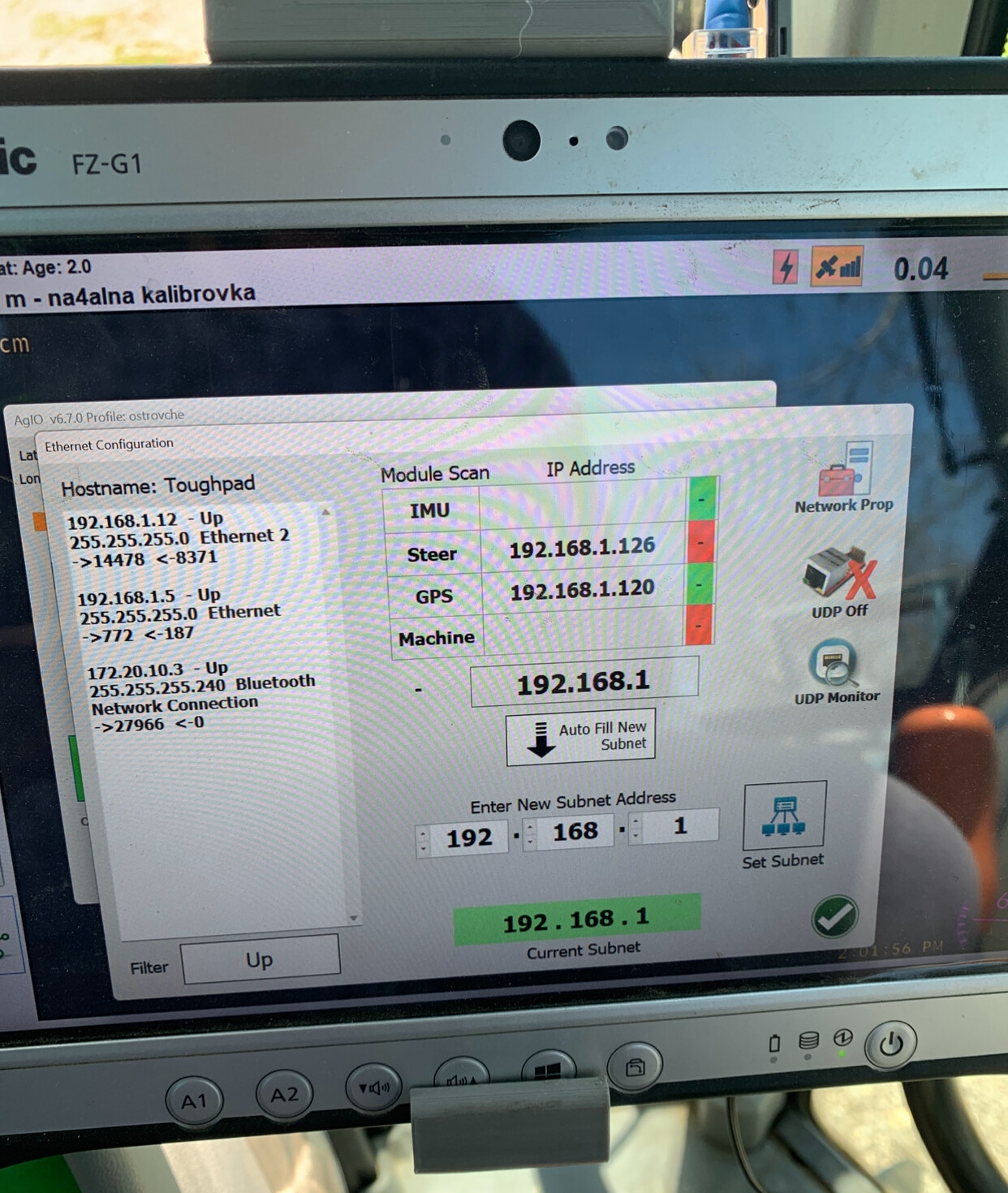
Ok so I got the IP addresses sorted out and put everything in the same subnet, and as you said AgIO is searching for the panda in the subnet that is setup so now I have corrections over UDP which is fantastic. Even the IMU lit up green.
But as I said when my steering board and Panda are in the same subnet, my steering module doesn’t light up green but oddly it doesn’t light in red either just like the IMU earlier when I had set different subnets. I haven’t tried to see if it actually works because I’m away at the moment but will test it out maybe tomorrow