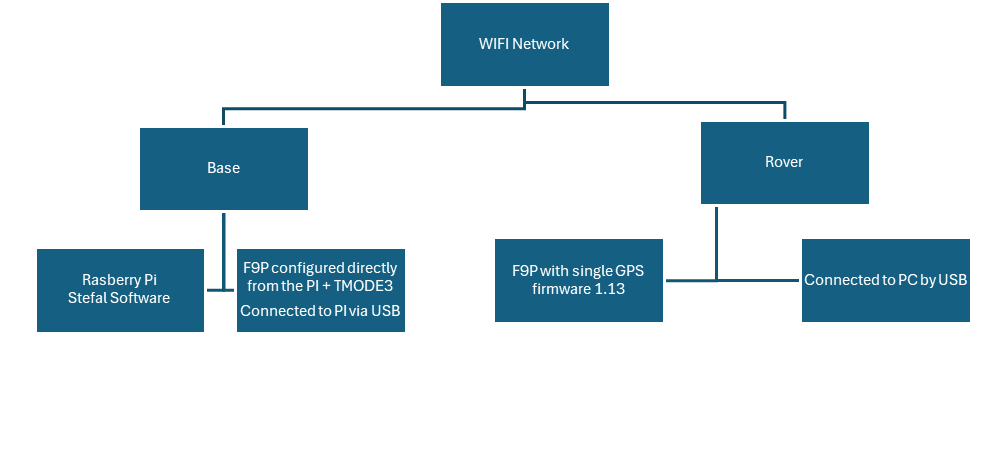
We are trying to set up a AIO board to use Stefals RTKbase as a base station and are unable to get a RTK fix on the AIO rover board. We have tried multiple configurations. We are using the AIO 4.1 board with a F9p micro for the rover board and a raspberry pi with a f9p standard as the base.
The antennas are outside and clear to the sky. The base does go to FixMode:Time and the Rover can get a RTK fix when we use a CORS network client. But when we try to use the base and the rover together we see that we have connected tot he local caster but we never get RTK FIX.
After reading three times I interpret the OP actually means the rover does not get RTK fix when “connected” to the local base. So many steps should be checked that it does not make sense to list them all, the OP needs to tell which details he has already checked.
The Rover doesn’t go to RTKFIX. When we connect the base to ucenter we are able to get a fixed mode of TIME.
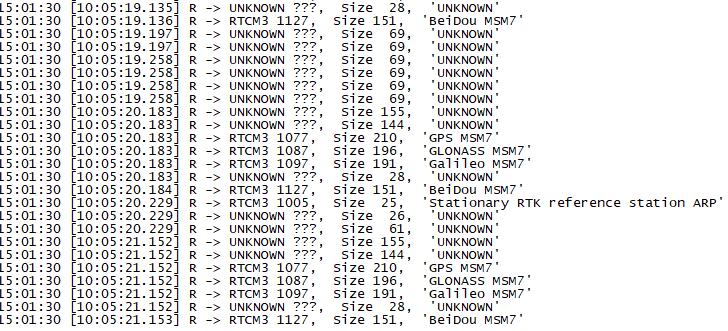
We are attempting to use Stefals Base station to transmit the corrections across our wifi network to a rover that is simply plugged into another PC that has AOG running. The AOG machine does indeed appear to connect to the caster and even gets a few messages but never a RTK fix.
Could you maybe post a picture of agio and what messages you are getting?
I’m not familiar with the setup of your base station and what you mean by a fixed mode of time? Do you mean it surveys in?
I can get a picture yes. If we set the base GPS to TMODE3 to stationary and enter GPS coordinates then on ucenter the fix type changes to Timed. From what I have found this is the correct fix for a base.
ok. I understand what you are saying and that is the correct way to do it. That is a different use of the term “fixed;” as in “fixed” vrs “survey in” instead of “fix” vrs “float” etc.
Download a fresh image of the Raspberry pi base and make sure the F9P is connected to the pi via USB before powering up. This will configure the F9P automatically to how his base software wants it.
I would also use an ethernet connection and hook up an HDMI to the pi to monitor the install and the IP address the base lands on.
I know a friend of mine used Ntrip Checker app to find an issue with one of his base stations. I don’t know if it would work for you or not.
I currently have a python scrtpt watching my base station 24/7 from a different network that will notify me if for any reason the base quits working. Has saved me a lot of stress once or twice.
I had left it not in time mode three for quite some time before trying the switch.
Fortunately I am not where the gps are set up until Monday so I can’t try testing anything until then. I did leave them on and there is a python script that runs and watches changes to help troubleshoot.
One open question I have for the discussion. Does the PI version matter? We work some with Victron solar and we need to use a Pi 3 to make that work.