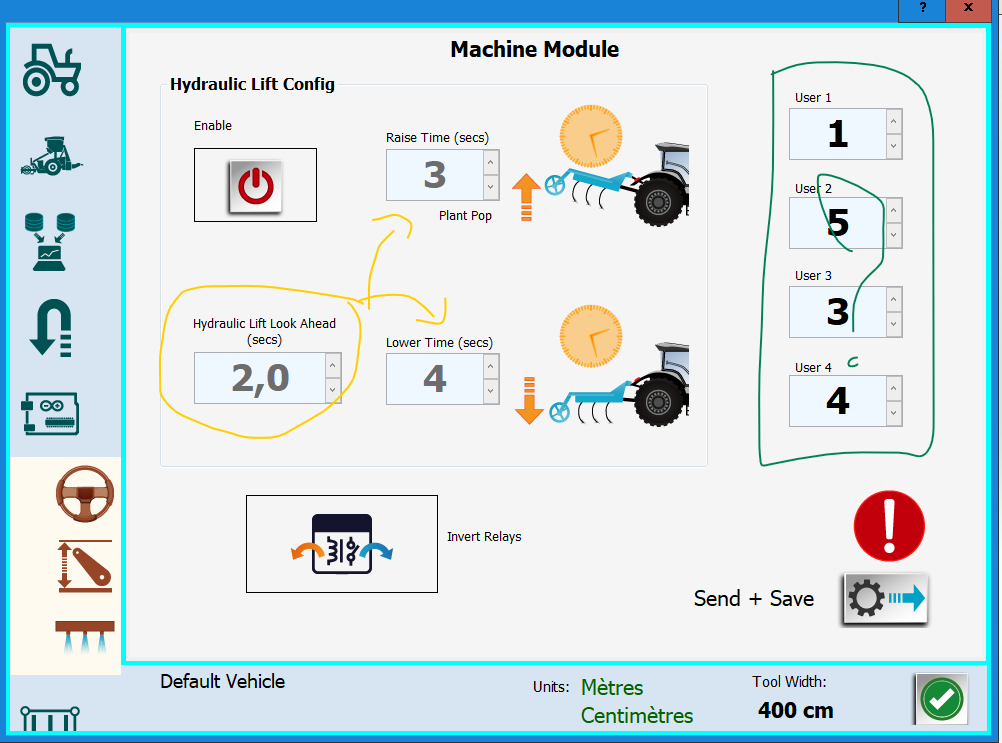
because implement have some play and some speed to do its task, I think it is necessary to have this ajustement for both function indepandatly ( yelow circle)
By summary an implement request more time than a spraying nozle so a specific timing Look Ahead is requested for raise and lower
Christmas has come for a third time this year! ( regular Christmas, Ukrainian Christmas, and now AOG Christmas)
I am probably one of many who made a request of user inputs, thanks to whoever implemented it. It will make guess and check values tweaking the nano much easier!!!
Well the implement isn’t raise timing set at all by that lookahead line, only the lower is. The raise is determined by when the entire tool leaves the work area and enters the headland - so not sure what you would even set.
i think both condition can required a timing set like section control timing ( that they have 3 parameter )
It can be compare at mega section control that you control the width with the condition that your explain
the first and the last section working define in advance raise or lower action
(also it can be nice if this parameter are in autosteer section because it is ajustable value on the field but not mandatory)
What sort of an implement are you considering here? If it was a seed drill, you can run section control to reach accurate switching on and off (obviously with the section control parameters that you requested for lifting).
Should be fine if the implement raises just after the headland line or with a minor delay. If a parameter is not essential, it just adds confusion for the majority.
@BrianTee_Admin Could be set for an infinite period. This would leave the hoist On or Off permanently. For example, the time is set to 99, and the function locks that function. This would be a good addition in terms of Electronic Hoist Management. (Autocontrol device in Valtra or others)
for infinite period
it can be manage by the arduino code
for example 99 equal infinite…
at oposite 0 equal nothing if you want only raise or lower
After i think a missing thing is to have some virtual button in AOG to check and validate that is working for raise and lower as we can do with section
I think that is why the machine code never really gets “finished” - there are so many ways people want to connect things and control them. Fortunately now there is those 4 user configurable settings as well.
So when set to 99, it just lifts and never stops, lowers and stays on never stops ? what does it do when you first turn on? How do you “stop” it then if it never shuts off after triggering?
I think we need it continuously when we have some kind of active pressure on seed drill for example
and i think it can be cancel from AOG if we stop autosteer function ( we have this value in arduino code “hydLift” it means cancel the function or what ever)
3pt itch on some tractor, use a stable switch for rise and lower, and some have also a “neutral” position (like my Massey Ferguson), you could start in neutral, no output for both rise and lower
Special setups certainly take special code. that is one of the hardest parts of the whole project, how do you add all these special features that function quite differently from each other without spending time writing code for every person that wants it.
I think you are not being harsh or anything when saying ‘it’s a special thing, if you need it, you will have to code it yourself’.
On request I have held a two-half-day course for a group of total novice farmers in Belgium on how to build a RTK-autosteer system yourself with AgOpenGPS. Only been possible because the program itself is quite easy to use, intuïtive with enough buttons to get you driving, and with great precision if you want to (important), but not have that many options that you lose oversight. Powerful yet clean. The ‘supported hardware’ schemes and manual.pdf are also a big help. The improvement in 2 years on user friendliness is huge! In part I believe for this clear decision not to overload it with options for special setups. Congratulations on contributor efforts
@BrianTee_Admin . I’m researching AOG v5.0 machine code. What is the value of hydLiftM in pgn 239 when hydlift is disabled?
If it is 0, it can be used to lock the hoist in place.