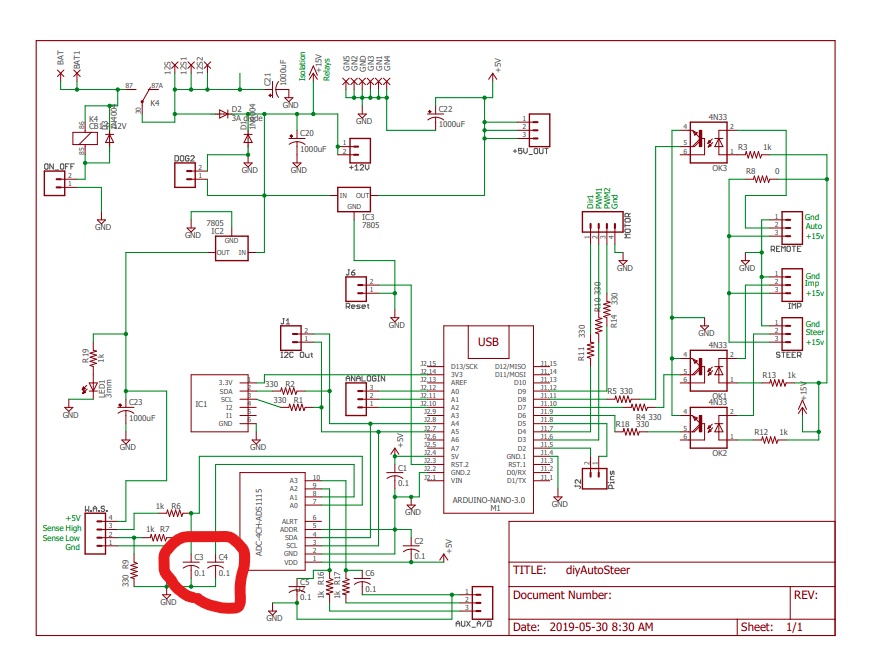
so i’m running aog with a steering wheel motor on a Versatile 4wd 750. i used a breadboard to assemble the system, using kapaui mod schematic. everything works well except the steering angle doesnt stay constant. you zero it while driving straight, then while autosteering down the field the steering angle will show off to one side and consequently the tractor will drive offline. as long as i babysit the steering angle value, it steers ok. i already wired my steering angle sensor directly to my 5v power supply, no help. maybe i need to get a pcb instead of breadboard system? any ideas?
Thanks to all who have developed aog. its really great having autosteer in my 46 year old machine… and for cheap!!
Congratulations with autosteer. I don’t think your problem relates to breadboard.
What WAS type do you have?
Pictures of WAS mounting.
What is your CPD? (Also tell Signal voltage from WAS full left and full right, EDIT: with your current mounting on tractor.)
Does the angle keep getting bigger to one side all by itself while sitting still?
Does the WAS remain zeroed while sitting still?
Did you use any IMU?
If so which one?
I am using bno 0085 imu. while sitting still degrees seem to be stable. But while driving down the field the WAS slowly drifts to one side or the other requring me to zero the angle while driving. using a GM suspension height sensor 3 wire potentiometer. replaced it already and no change. will try to upload a pic. will try to get some voltage and degree readings when i get a chance.
had to turn the cpd much lower than setup wizard recommended to keep from oversteering
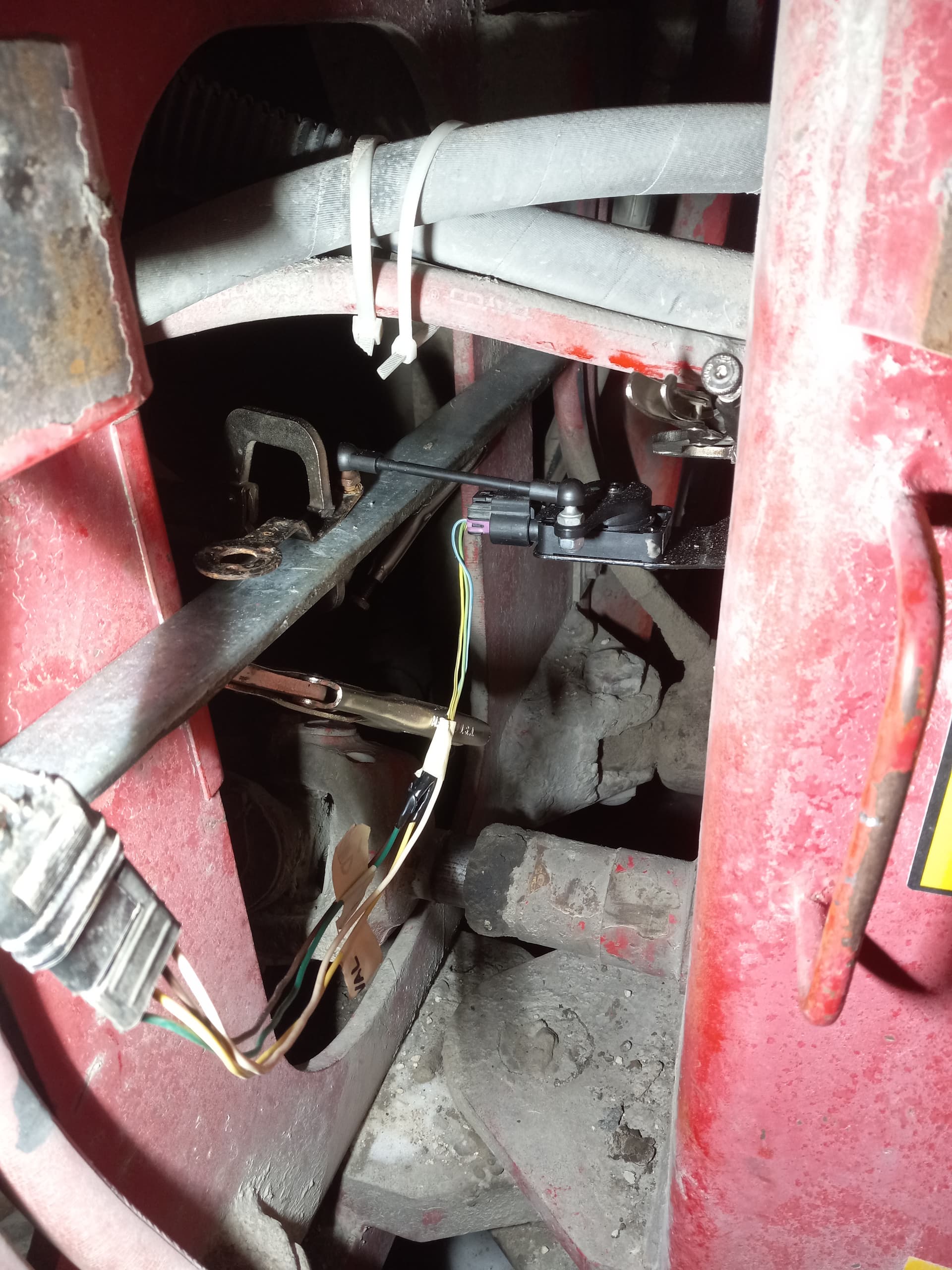
this pic is when i had it temporarily mounted , but it is still the same only bolted now
If what I think I see is both the bottom pivot point, and just below WAS one end of top pivot point, then it can NOT work. WAS must be as close to bottom pivot point (the one that does not move sideways traversing an obstacle)
Also make sure you use all the degree of WAS is constructed for, when steering full left to right.
If you don’t know the working angle of the WAS, then measure at full left and right. Signal should be close to 0.5 V and 4.5 V .
The more voltage difference you can get the more precise steering can be.
You did not tell what CPD counts per degree you use now, please inform!
The tractor pivot kind of looks like a versatile articulated 4wd. (Lol just scrolled up to the first post haha)

The first sensor arm should point in the direction of travel, either forward or reverse. Here is an example from a Stieger 4wd. In this case the first sensor arm points in reverse behind the steering joint like a tail.
The purpose of the second arm is to allow for movement back an forth in the radius if not perfectly on center. As you can see worn into the dust on the lower support.