I build my second AgOpen System in my Fendt 712 Vario COM1.
But I’m not able to get the system work properly.
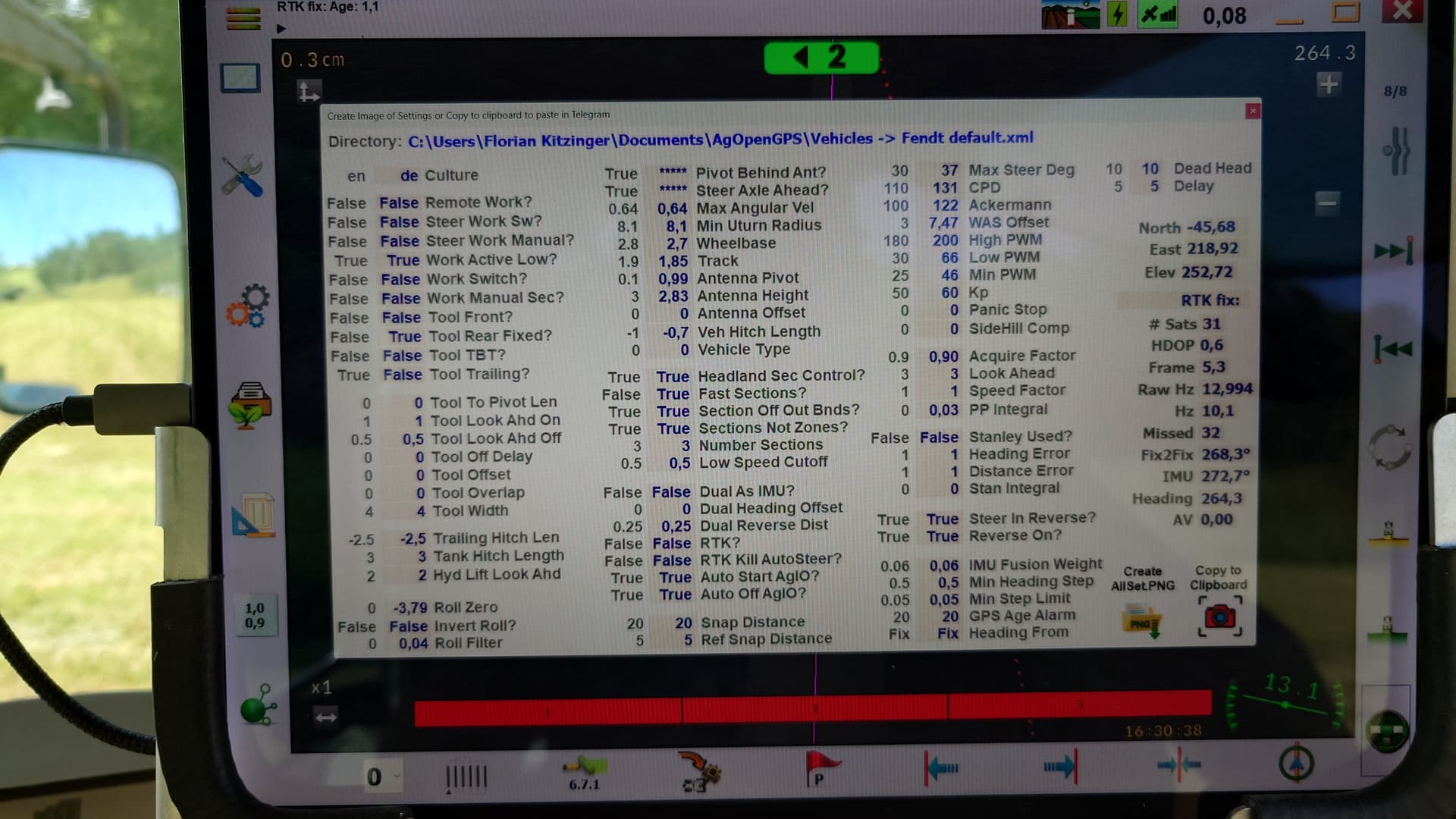
I set up the system as usual, set the dimentions in settings and after this I made the settings for CPD, Ackermann and the zero degree calibration.
Then I made the settings for min to move and and Prop setting.
After this I tried to Setup the values for the purpersuit steering mode, but thats nearly Impossible. The tractor ist steering from left to right continusly, around ±10cm
Are you using motor or valve for autosteer, what WAS are you using and what board?
Is your IMU propertly zeroed cuz I see its +13 deg tilted and Its a nice sidehill but the field in background looks flat?
Hi,
I’m using a steering Motor with a 3d printed gear mounted at the steering wheel. The WAS is a Honeywell RTY090LVEAX mounted directly to the axel.
The IMU is calibrated correctly, the field in the pictures is around 13 degrees steep, thats correct.
I’m using the PCB from Andreas Ortner with single GPS and BNO085.
Br Florian
Hi,
thanks for your answer, I read this post and checked all named topics.
But it won’t work. I tested I higher CPD, no difference.
I downgraded to 6.3.3 - no difference
Here a video, how the system works:
The system don’t get closer than ±10cm to the AB line
Have you set min pwm properly? Set gain to 1 and find where min value barely starts to turn the wheel. Than set max to about 150 and finish tuning with gain setting