I’m testing the new version, no issues so far in Panda setup. However, I don’t understand how this tab works and how to adjust its settings
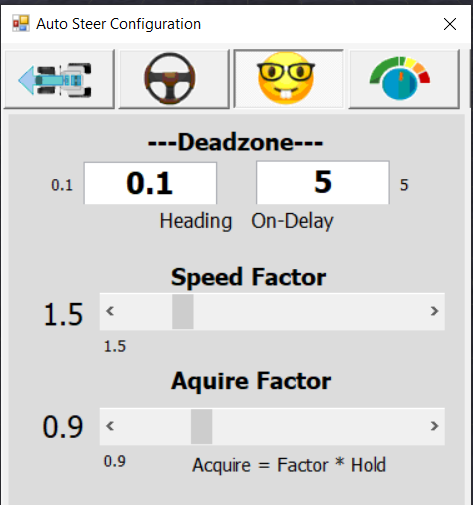
The Deadzone is a period when the vehicle is on the line. If the heading is > .1 degrees for 5 seconds(?), then the steering goes to 0 pwm until the vehicle starts going off line.
Speed factor is essentially “Look Ahead Speed Gain”
Aquire is essentially “Aquire Look Ahead”
Ok, thanks! The deadzone implementation is a nice feature. No bugs so far on my old tablet.
How to set it up correctly?
IMO if you’re going faster, slightly higher speed factor but I haven’t really ever seen much change from messing with these ones