Not sure. It has been a while since I move it from one version to another. I’ll look into it.
Do you think a Navigate to point (flag) could be added to v5.7?
With that we could use AOG to put down physical corner markers on fields.
Would be useful for “find that stone I marked” too…
The flag drive to is already in AOG. Just recorded flags and scroll to the one you want.
1 Like
So I was having problems last year with the tractor not switching to the correct direction when we started a new row, and a couple times it just disappeared. right now I am trying to run it in simulator mode, but it is trying to turn the steering like autosteer. also the tractor wants to stay strait, and move at an angle instead of turning with the steering wheels. I am running 5.2.0 tee planting. is there a newer version? I have been playing some more and the tractor disappeared in simulator mode. call me if you can.6128124780. thanks
If you increase the speed does it change? There is a slow speed filter in this version. I have begun the conversion to the new 6. Version. It will take a while due to the boundary and lines having been completely re done since this version.
1 Like
So i think part of my problem was cold solder joints on the connector for the usb cable on the ublox board. It finnaly just broke off. I held it in place and reflowed the solder. It is small. I can’t believe it worked. But the tractor never went sideways or backwards after that. Speeding up did help. .6mph it wasn’t doing too good. But .9 mph it worked much better. I still have the problem of it jumping around quite a bit. The board might still have a problem. I would have to do a lot of smoothing with just my driving. The problem with that was if it jumped around while passing a tree, it would miss a beep, and a tree wouldn’t get planted.
The slow speed is a killer. The gps has to be spot on to keep from jumping at these slow speeds. Rtk is a must. Gps condition “fix” is a must. Then it still may bounce a bit. Have you tried the slow speed filter? It actually averages the incoming gps location. Not the best solution, but it slows the jumping a bit. There is also a minimum speed setting. Set it as low as possible. Most of these settings were originally on the left side of the screen where you set the tree spaces and layout.
I have RTK. What is Gps condition fix? I was using the slow speed filter set at .5mph (the lowest setting). It was a little spuratic. Sometimes it would be rock solid and the position would follow my route exactly. Then othertimes it would bounce around. Maybe it is the board that I resoldered. Is there someone who sells better enclosures with panel mount connectors on the enclosure, so there is no strain on the card. Plus something that is a nema cabinet to keep the dirt out.
Is the filtering similar to the old slowPoke version? Might the tree planter version be better suited than the plain version for super low speed vegetable planting?
You may want to try the latest version of just plain AOG and see if it is bouncy at low speeds. Gps fix is the state when the corrections become stable. There is also float single none and others. Fix is the highest quality. It still allows for some movement. There is a screen where you can see this in AOG. I can’t recall where it is in this version. Maybe click where the speed txt is shown at the top of the screen. Wherever it is you will see the gps information in the same window.
Brian has added a very slow filter in the latest version. I have not tried it. Dual gps will be the best. All that the tree version does is average a second worth of gps with a weighted average. The most recent value is given a higher weight. At these slow speeds you are getting close the capabilities of the gps. ,5 mph and a 10hz gps speed puts the points less than an inch apart. With the accuracy of the gps at 2 cm it will get a bit jumpy. Slowing the gps feed will give a better direction indication, but screen gets jumpy. Hence the average. Brian’s keeps the heading but uses the most recent gps. Lots going on in there.
1 Like
What about this tree planning on a sharp hill side? The slopes with up to 30 degrees that have to be precisely spaced. Is there any way to do this? Have LIDAR topography files for the fields.
No, the tree planner is specifically xy space on a flat plane. With Panda, you could get the accurate xy in one direction, right to left, but fairly certain front to back would still be off. Now if the spaces are sloped spaces you are wanting to plant, wow what a mess. Not sure how that would even layout, much less plant.
Perhaps it would not be very difficult to import this lidar DSM file (or convert it to something) and bring it in at the grid creation stage? Or is it a major operation
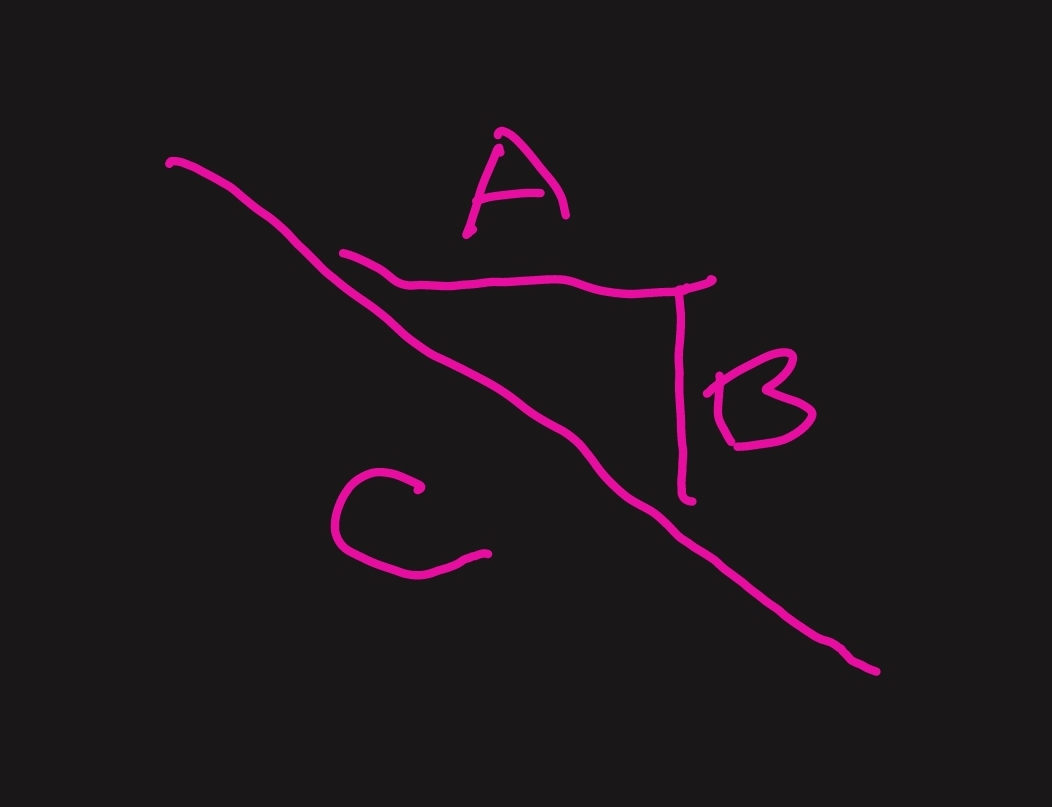
Are you wanting the same A space or C space?
A is fairly easy and the panda will do most of this out of the box.
C not so much. You could easily add a slope factor based on the current slope to effectively shrink the abline space, but it would not add together the previous shrinks to keep this tree in the same space from the previous tree. It would assume that each pass reset itself. Contour would be a better match for this.
C is the distance we care about. And then the rows themselves still have to be straight regardless.
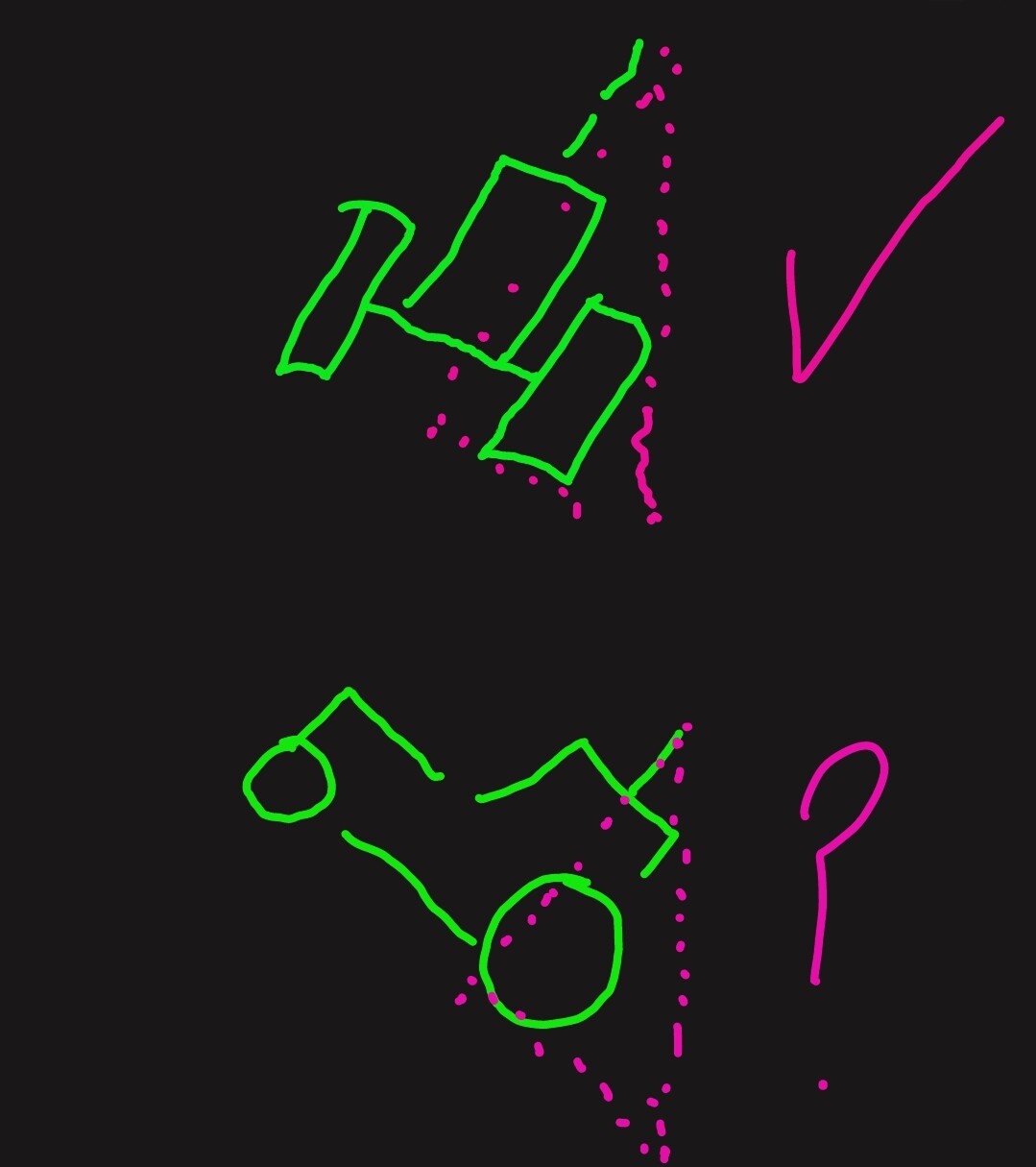
Three trees in a row on three different slopes will not give a straight line.
All three pink lines have the same C, radius of a circle. The green lines would be the line of trees when trying to line them up. The math just doesn’t work.
I understand. I guess just maintain the tree distance within each row, and the distance between rows can be perhaps the average of all the sloped distances. The rows have to be straight for logistical purposes.