Hi all
I am struggling to figure out the Arduino code for the system. I did modify how the system works as I do not connect to the tractor steering, but attach the motor directly to my moving parts. There are 2 parts that I am struggling:
-
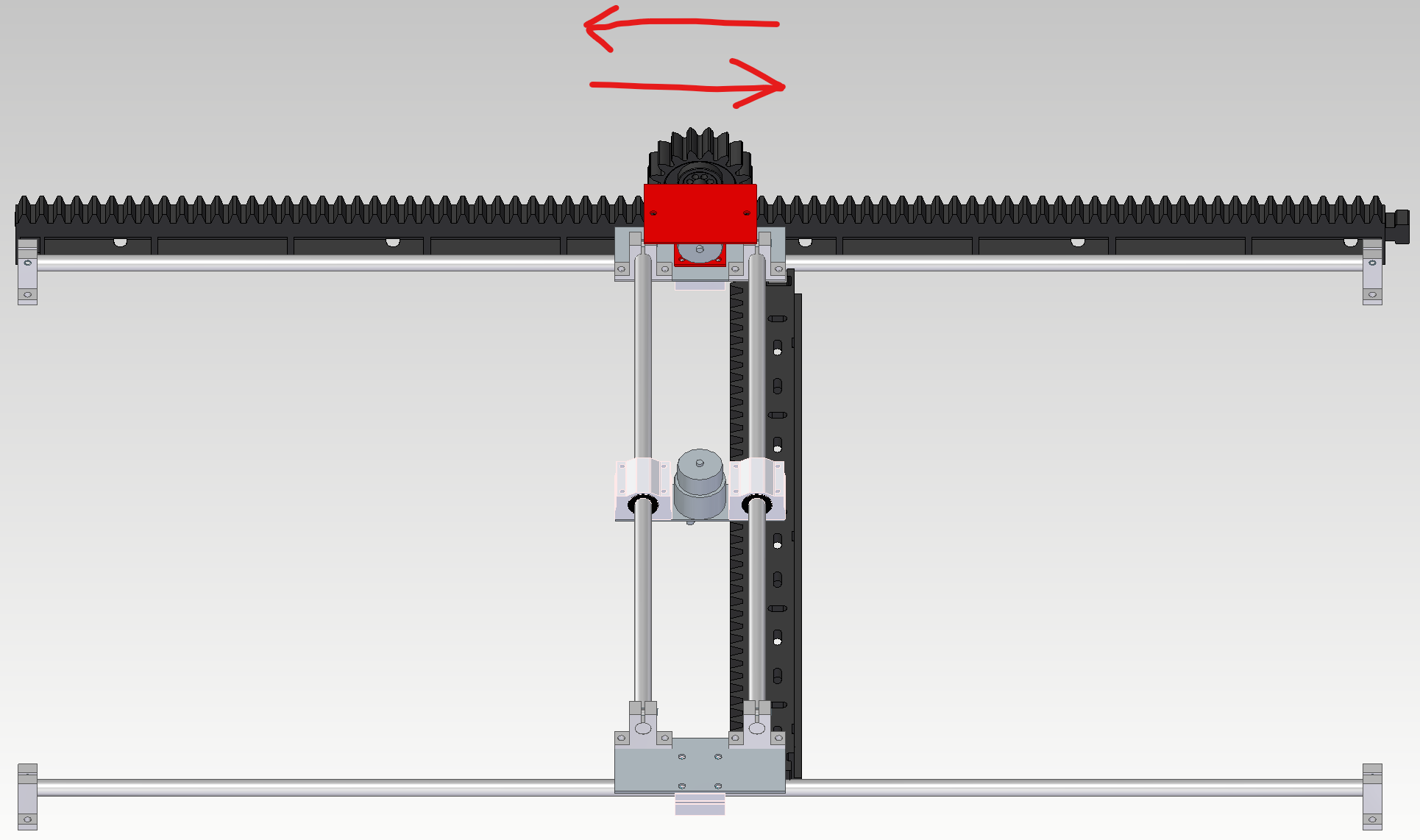
The whole system is attached to the back of the tractor. My antenna (location indicated in red) will move with the motor. This means that the antenna will always stay on the AB line. It also means, to my understanding, that no angle sensor is is needed since there is no wheel to determine the angle on. Will I need modifications in the code to not use the angle sensor or will it be fine?
-
I need to trigger a relay and motor and need to know the tractor speed when I get to the GPS locations of the trees. How can I trigger the relay and motor and keep it on for a certain duration depending on the tractor speed?
I hope you are able to help.
Thank you