I have been working on planting corn with a Case MX270 this week but I have been having problems getting things tuned to get straight lines. I do have an RTKBase setup at the farm that is about a mile away. I am using the Micro Board V4.5 using AOG 6.7. I have been using a land rover ride height sensor for the WAS. I couldn’t figure a way to make a Phidget motor to work with the gear set on this tractor but it did come with a Tremble autosteer system with the 12V EZ wheel motor that sits on the steering wheel. I seen that it has been used by a few on here so I thought to try giving it a shot.
I thought I had it figured out before planting season but once we got going I have been trying to get it tuned in further but I have not been able to get it to do do a straight line. After some reading from others on here I am going to double check for any play in the WAS. I am also considering that the Tremble can’t do it or even the motor could have an issue. I have no idea how old it is as it came with the tractor when we bought it.
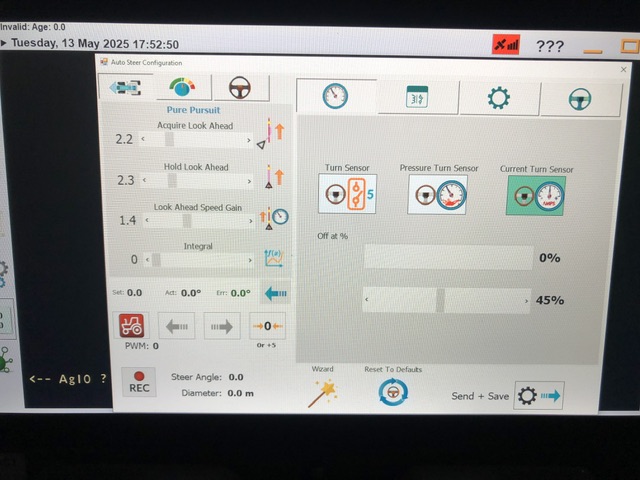
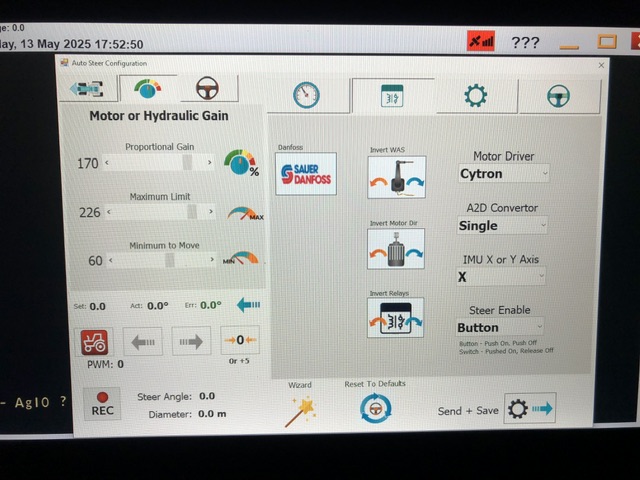
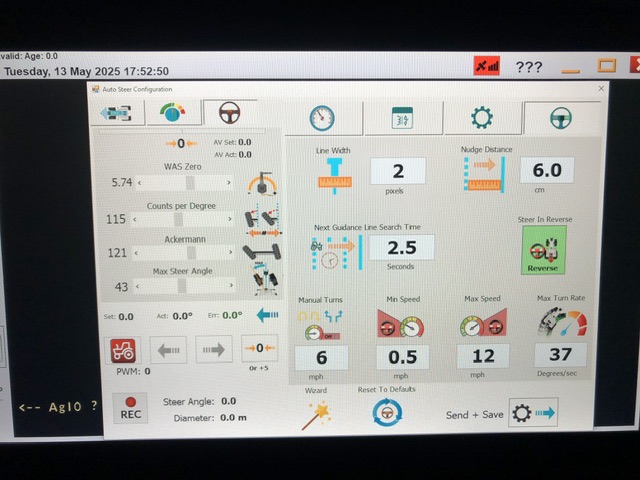
These are the current settings I have.
Steer Response 3
Integral 0
P Gain 55
Min to Move 28
Max Limit 120
Speed Factor 1.5
Acquire Factor .9
Biggest issue I have sway on and off but it almost seems like the tremble will have large movements here and there that causes the sway. Maybe too much? I run the planter usually at 5 mph. Slowing it down does seem to help a little. Sometimes the steering will be pretty straight for awhile and then it almost seems as if the motor tries to make a larger change to correct itself causing it to sway farther off course.
I also took a short video here of the screen and the Tremble working if this helps.
I think tomorrow I am going to try doing the wizard another time but any suggestions are greatly appreciated. Thanks.
Yes watched that a number of times. I have watched the wizard one as well a number of times. One part that I never found really clear is when setting the min to move should I have the WAS error at one like this video says or should I bring it higher like it is done in the steering wizard video.
I do feel I get what is going on. I have tried about every point from 30 to 75 on the proportional gain. I have not moved min to move a whole lot though. I also tried to move was zero a few times each way to see if that helps in case I was off.
Also I have only been assuming this but I am guessing that you should be able to get things pretty straight with the P Gain, min to move, counts per degree, Ackerman, and was zero correct? Do other settings coming into play as much?
Turn your gain down to 25-30
And turn min to move up to 35-40
In field conditions the min to move needs to be higher than when doing setup on a lane way. The high gain is causing the wobble.
You want wheels to start moving with a 1-2 angle error
With gain at 55 x 1 degree angle plus your minimum to move at 28 = 83 pwm
With gain at 25 x 1 degree angle plus minimum to move at 40 = 65 pwm
Hey thanks for the info. I tightened up the WAS some and I ran through the wizard with the idea to move left or right one degree when setting min and my min is now at 58 and now I have gain at 45 right now and lines are 100 percent better. Sometimes it will go as far as 5 or 6 cm off and take a bit to get back but 80 percent of the time it is on zero now. It has been a frustrating past two days and feeling good about this win.
Here are my settings for an ez steer motor with AIO in a John Deere 8100 (similar ish size tractor).
I think the main difference is that my p gain is cranked wayyy up compared to yours and compared to most other setups. The ez steer is a slow motor and it needs that p gain to react.
I have my min to move set quite low for this motor because I like it to have a little dead spot around 0 xte. My ez steer “quite low” is much higher than for a phidgets motor.
Turn up minimum to move until the motor is (just barely) always moving. It should not be stopped half the time like in your video. The system is badly lagging in your video, you need to crank everything up. Once you have it working well you can back minimum to move down a hair just to stop the annoyance of the always moving.
It’s a slow motor. I can do U turns, but only if I slow down to ~5mph or less. No issues at all on straight lines and gentle curves.