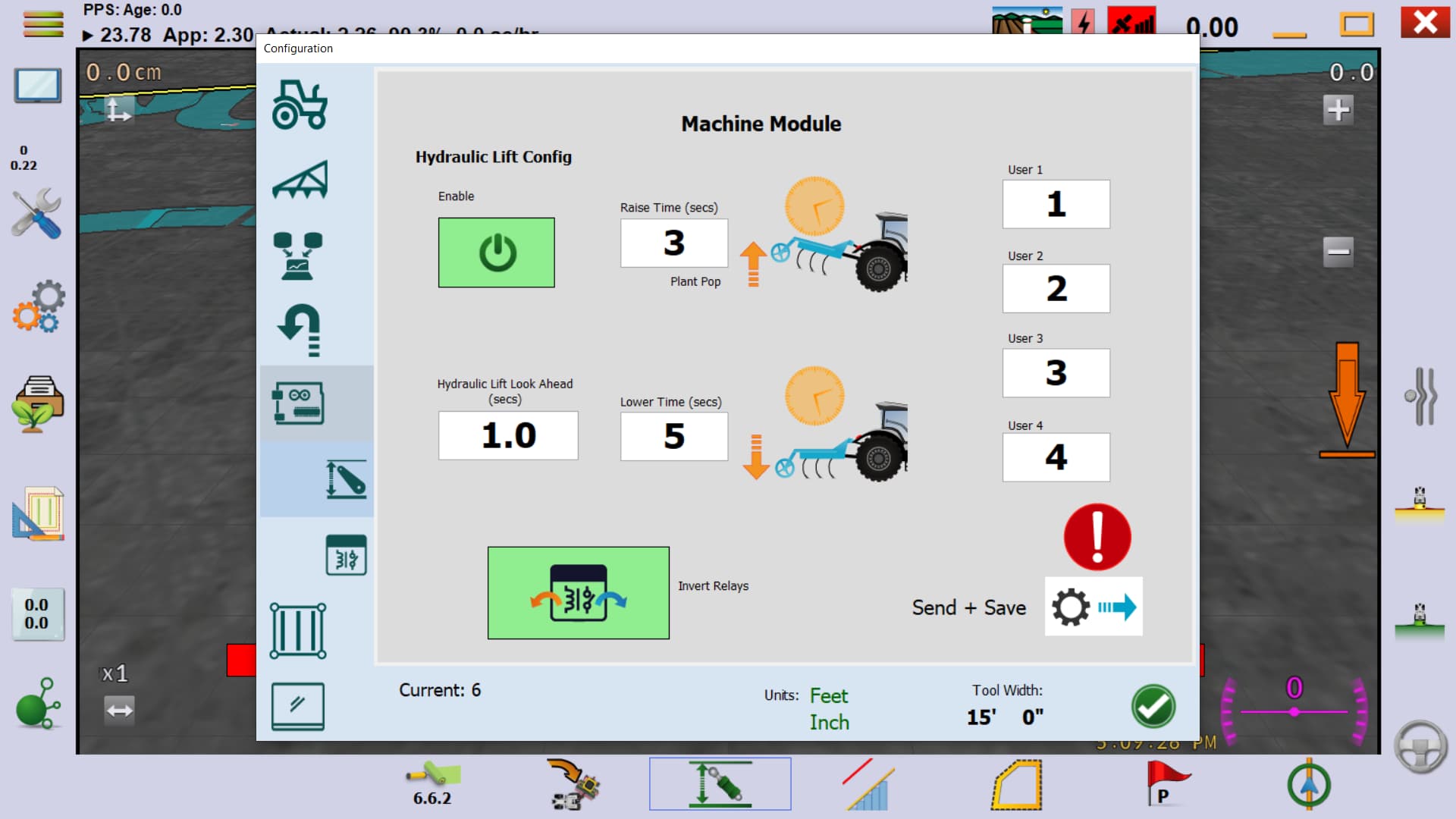
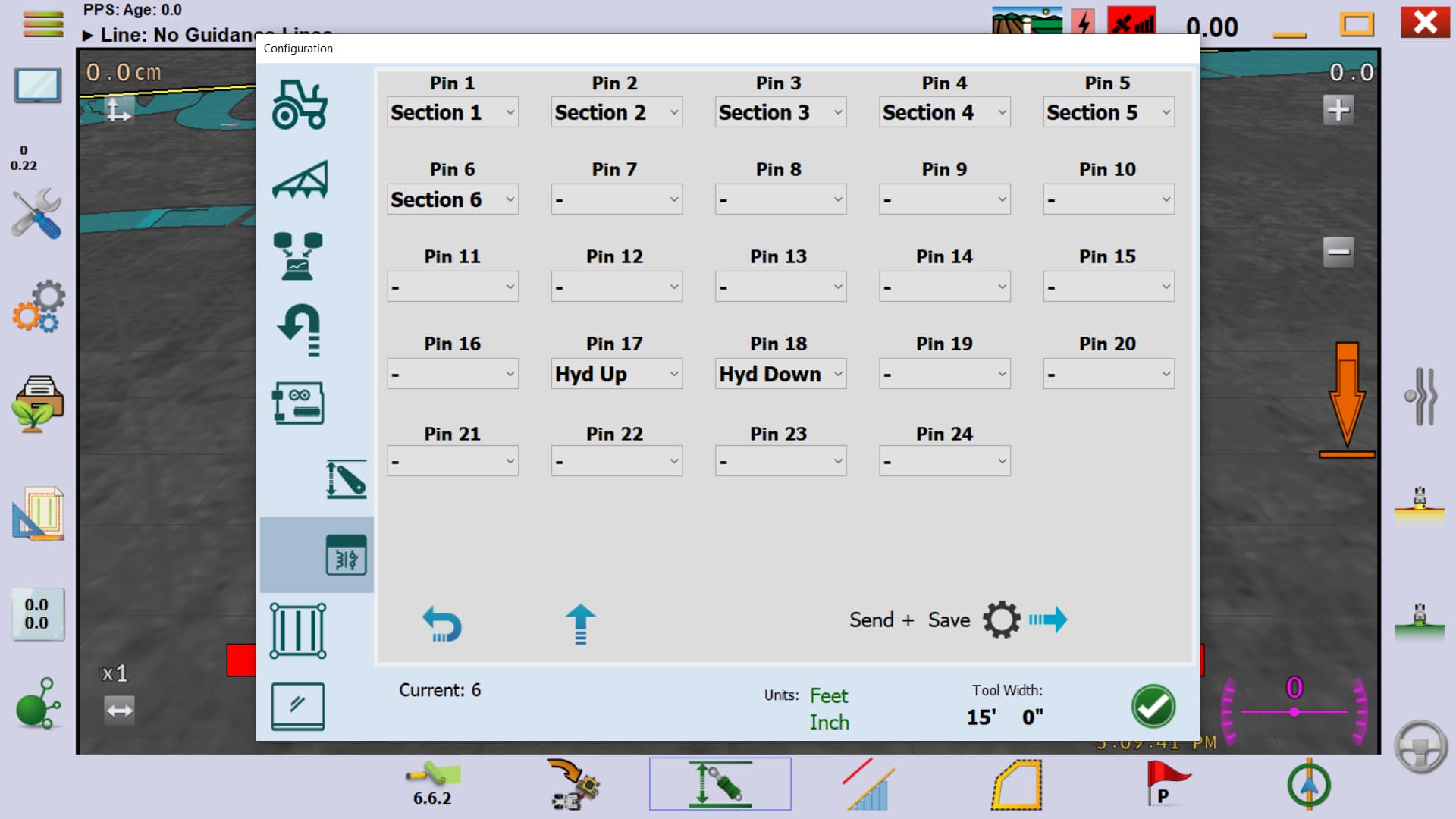
I have been working on my machine board and have it mostly together but I am yet to get the hyd Down to work. Using UDP with a nano to control sections and hyd up/down. I have tried a few different outputs on the nano and changes to the code but no different. I get the proper Up function when crossing the headland but never Down? Only other odd thing it always shows save and send anytime I open the machine board setting even if I have yet to change.
//Machine Control - Brian Tee - Cut and paste from everywhere
//-----------------------------------------------------------------------------------------------
// Change this number to reset and reload default parameters To EEPROM
#define EEP_Ident 0x5425
//the default network address
struct ConfigIP {
uint8_t ipOne = 192;
uint8_t ipTwo = 168;
uint8_t ipThree = 5;
}; ConfigIP networkAddress; //3 bytes
//-----------------------------------------------------------------------------------------------
#include <EEPROM.h>
#include <Wire.h>
#include "EtherCard_AOG.h"
#include <IPAddress.h>
// ethernet interface ip address
static uint8_t myip[] = { 0,0,0,123 };
// gateway ip address
static uint8_t gwip[] = { 0,0,0,1 };
//DNS- you just need one anyway
static uint8_t myDNS[] = { 8,8,8,8 };
//mask
static uint8_t mask[] = { 255,255,255,0 };
//this is port of this autosteer module
uint16_t portMy = 5123;
//sending back to where and which port
static uint8_t ipDestination[] = { 0,0,0,255 };
uint16_t portDestination = 9999; //AOG port that listens
// ethernet mac address - must be unique on your network
static uint8_t mymac[] = { 0x00,0x00,0x56,0x00,0x00,0x7B };
uint8_t Ethernet::buffer[200]; // udp send and receive buffer
//Variables for config - 0 is false
struct Config {
uint8_t raiseTime = 2;
uint8_t lowerTime = 4;
uint8_t enableToolLift = 0;
uint8_t isRelayActiveHigh = 0; //if zero, active low (default)
uint8_t user1 = 0; //user defined values set in machine tab
uint8_t user2 = 0;
uint8_t user3 = 0;
uint8_t user4 = 0;
}; Config aogConfig; //4 bytes
//Program counter reset
void(*resetFunc) (void) = 0;
//ethercard 10,11,12,13 Nano = 10 depending how CS of ENC28J60 is Connected
#define CS_Pin 10
/*
* Functions as below assigned to pins
0: -
1 thru 16: Section 1,Section 2,Section 3,Section 4,Section 5,Section 6,Section 7,Section 8,
Section 9, Section 10, Section 11, Section 12, Section 13, Section 14, Section 15, Section 16,
17,18 Hyd Up, Hyd Down,
19 Tramline,
20: Geo Stop
21,22,23 - unused so far*/
uint8_t pin[] = { 1,2,3,4,5,6,0,0,0,0,0,0,0,0,0,0,17,18,0,0,0,0,0,0 };
//read value from Machine data and set 1 or zero according to list
uint8_t relayState[] = { 0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0 };
//hello from AgIO
uint8_t helloFromMachine[] = { 128, 129, 123, 123, 5, 0, 0, 0, 0, 0, 71 };
const uint8_t LOOP_TIME = 200; //5hz
uint32_t lastTime = LOOP_TIME;
uint32_t currentTime = LOOP_TIME;
uint32_t fifthTime = 0;
uint16_t count = 0;
//Comm checks
uint8_t watchdogTimer = 20; //make sure we are talking to AOG
uint8_t serialResetTimer = 0; //if serial buffer is getting full, empty it
bool isRaise = false, isLower = false;
//Communication with AgOpenGPS
int16_t temp, EEread = 0;
//Parsing PGN
bool isPGNFound = false, isHeaderFound = false;
uint8_t pgn = 0, dataLength = 0, idx = 0;
int16_t tempHeader = 0;
//settings pgn
uint8_t PGN_237[] = { 0x80,0x81, 0x7f, 237, 8, 1, 2, 3, 4, 0,0,0,0, 0xCC };
int8_t PGN_237_Size = sizeof(PGN_237) - 1;
//The variables used for storage
uint8_t relayHi = 0, relayLo = 0, tramline = 0, uTurn = 0, hydLift = 0, geoStop = 0;
float gpsSpeed;
uint8_t raiseTimer = 0, lowerTimer = 0, lastTrigger = 0;
void setup()
{
//set the baud rate
Serial.begin(38400);
//while (!Serial) { ; } // wait for serial port to connect. Needed for native USB
EEPROM.get(0, EEread); // read identifier
if (EEread != EEP_Ident) // check on first start and write EEPROM
{
EEPROM.put(0, EEP_Ident);
EEPROM.put(6, aogConfig);
EEPROM.put(20, pin);
EEPROM.put(50, networkAddress);
}
else
{
EEPROM.get(6, aogConfig);
EEPROM.get(20, pin);
EEPROM.get(50, networkAddress);
}
if (ether.begin(sizeof Ethernet::buffer, mymac, CS_Pin) == 0)
Serial.println(F("Failed to access Ethernet controller"));
//grab the ip from EEPROM
myip[0] = networkAddress.ipOne;
myip[1] = networkAddress.ipTwo;
myip[2] = networkAddress.ipThree;
gwip[0] = networkAddress.ipOne;
gwip[1] = networkAddress.ipTwo;
gwip[2] = networkAddress.ipThree;
ipDestination[0] = networkAddress.ipOne;
ipDestination[1] = networkAddress.ipTwo;
ipDestination[2] = networkAddress.ipThree;
//set up connection
ether.staticSetup(myip, gwip, myDNS, mask);
ether.printIp("_IP_: ", ether.myip);
ether.printIp("GWay: ", ether.gwip);
ether.printIp("AgIO: ", ipDestination);
//register to port 8888
ether.udpServerListenOnPort(&udpSteerRecv, 8888);
//set the pins to be outputs (pin numbers)
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(3, OUTPUT);
Serial.println("Setup complete, waiting for AgOpenGPS");
}
void loop()
{
//Loop triggers every 200 msec and sends back gyro heading, and roll, steer angle etc
currentTime = millis();
if (currentTime - lastTime >= LOOP_TIME)
{
lastTime = currentTime;
//If connection lost to AgOpenGPS, the watchdog will count up
if (watchdogTimer++ > 250) watchdogTimer = 20;
//clean out serial buffer to prevent buffer overflow
if (serialResetTimer++ > 20)
{
while (Serial.available() > 0) Serial.read();
serialResetTimer = 0;
}
if (watchdogTimer > 20)
{
if (aogConfig.isRelayActiveHigh) {
relayLo = 255;
relayHi = 255;
}
else {
relayLo = 0;
relayHi = 0;
}
}
//hydraulic lift
if (hydLift != lastTrigger && (hydLift == 1 || hydLift == 2))
{
lastTrigger = hydLift;
lowerTimer = 0;
raiseTimer = 0;
//200 msec per frame so 5 per second
switch (hydLift)
{
//lower
case 1:
lowerTimer = aogConfig.lowerTime * 5;
break;
//raise
case 2:
raiseTimer = aogConfig.raiseTime * 5;
break;
}
}
//countdown if not zero, make sure up only
if (raiseTimer)
{
raiseTimer--;
lowerTimer = 0;
}
if (lowerTimer) lowerTimer--;
//if anything wrong, shut off hydraulics, reset last
if ((hydLift != 1 && hydLift != 2) || watchdogTimer > 10) //|| gpsSpeed < 2)
{
lowerTimer = 0;
raiseTimer = 0;
lastTrigger = 0;
}
if (aogConfig.isRelayActiveHigh)
{
isLower = isRaise = false;
if (lowerTimer) isLower = true;
if (raiseTimer) isRaise = true;
}
else
{
isLower = isRaise = true;
if (lowerTimer) isLower = false;
if (raiseTimer) isRaise = false;
}
//section relays
SetRelays();
//checksum
int16_t CK_A = 0;
for (uint8_t i = 2; i < PGN_237_Size; i++)
{
CK_A = (CK_A + PGN_237[i]);
}
PGN_237[PGN_237_Size] = CK_A;
//off to AOG
ether.sendUdp(PGN_237, sizeof(PGN_237), portMy, ipDestination, portDestination);
} //end of timed loop
delay(1);
//this must be called for ethercard functions to work. Calls udpSteerRecv() defined way below.
ether.packetLoop(ether.packetReceive());
}
//callback when received packets
void udpSteerRecv(uint16_t dest_port, uint8_t src_ip[IP_LEN], uint16_t src_port, uint8_t* udpData, uint16_t len)
{
/* IPAddress src(src_ip[0],src_ip[1],src_ip[2],src_ip[3]);
Serial.print(“dPort:”); Serial.print(dest_port);
Serial.print(" sPort: “); Serial.print(src_port);
Serial.print(” sIP: “); ether.printIp(src_ip); Serial.println(” end");
//for (int16_t i = 0; i < len; i++) {
//Serial.print(udpData[i],HEX); Serial.print("\t"); } Serial.println(len);
*/
if (udpData[0] == 0x80 && udpData[1] == 0x81 && udpData[2] == 0x7F) //Data
{
if (udpData[3] == 239) //machine data
{
uTurn = udpData[5];
gpsSpeed = (float)udpData[6];//actual speed times 4, single uint8_t
hydLift = udpData[7];
tramline = udpData[8]; //bit 0 is right bit 1 is left
relayLo = udpData[11]; // read relay control from AgOpenGPS
relayHi = udpData[12];
if (aogConfig.isRelayActiveHigh)
{
tramline = 255 - tramline;
relayLo = 255 - relayLo;
relayHi = 255 - relayHi;
}
//Bit 13 CRC
//reset watchdog
watchdogTimer = 0;
}
else if (udpData[3] == 200) // Hello from AgIO
{
if (udpData[7] == 1)
{
relayLo -= 255;
relayHi -= 255;
watchdogTimer = 0;
}
helloFromMachine[5] = relayLo;
helloFromMachine[6] = relayHi;
ether.sendUdp(helloFromMachine, sizeof(helloFromMachine), portMy, ipDestination, portDestination);
}
else if (udpData[3] == 238)
{
aogConfig.raiseTime = udpData[5];
aogConfig.lowerTime = udpData[6];
aogConfig.enableToolLift = udpData[7];
//set1
uint8_t sett = udpData[8]; //setting0
if (bitRead(sett, 0)) aogConfig.isRelayActiveHigh = 1; else aogConfig.isRelayActiveHigh = 0;
aogConfig.user1 = udpData[9];
aogConfig.user2 = udpData[10];
aogConfig.user3 = udpData[11];
aogConfig.user4 = udpData[12];
//crc
//save in EEPROM and restart
EEPROM.put(6, aogConfig);
//resetFunc();
}
else if (udpData[3] == 201)
{
//make really sure this is the subnet pgn
if (udpData[4] == 5 && udpData[5] == 201 && udpData[6] == 201)
{
networkAddress.ipOne = udpData[7];
networkAddress.ipTwo = udpData[8];
networkAddress.ipThree = udpData[9];
//save in EEPROM and restart
EEPROM.put(50, networkAddress);
resetFunc();
}
}
//Scan Reply
else if (udpData[3] == 202)
{
//make really sure this is the subnet pgn
if (udpData[4] == 3 && udpData[5] == 202 && udpData[6] == 202)
{
uint8_t scanReply[] = { 128, 129, 123, 203, 7,
networkAddress.ipOne, networkAddress.ipTwo, networkAddress.ipThree, 123,
src_ip[0], src_ip[1], src_ip[2], 23 };
//checksum
int16_t CK_A = 0;
for (uint8_t i = 2; i < sizeof(scanReply) - 1; i++)
{
CK_A = (CK_A + scanReply[i]);
}
scanReply[sizeof(scanReply)-1] = CK_A;
static uint8_t ipDest[] = { 255,255,255,255 };
uint16_t portDest = 9999; //AOG port that listens
//off to AOG
ether.sendUdp(scanReply, sizeof(scanReply), portMy, ipDest, portDest);
}
}
else if (udpData[3] == 236) //EC Relay Pin Settings
{
for (uint8_t i = 0; i < 24; i++)
{
pin[i] = udpData[i + 5];
}
//save in EEPROM and restart
EEPROM.put(20, pin);
}
}
}
void SetRelays(void)
{
//pin, rate, duration 130 pp meter, 3.6 kmh = 1 m/sec or gpsSpeed * 130/3.6 or gpsSpeed * 36.1111
//gpsSpeed is 10x actual speed so 3.61111
gpsSpeed *= 3.61111;
//tone(13, gpsSpeed);
//Load the current pgn relay state - Sections
for (uint8_t i = 0; i < 8; i++)
{
relayState[i] = bitRead(relayLo, i);
}
for (uint8_t i = 0; i < 8; i++)
{
relayState[i + 8] = bitRead(relayHi, i);
}
// Hydraulics
relayState[16] = isLower;
relayState[17] = isRaise;
//Tram
relayState[18] = bitRead(tramline, 0); //right
relayState[19] = bitRead(tramline, 1); //left
//GeoStop
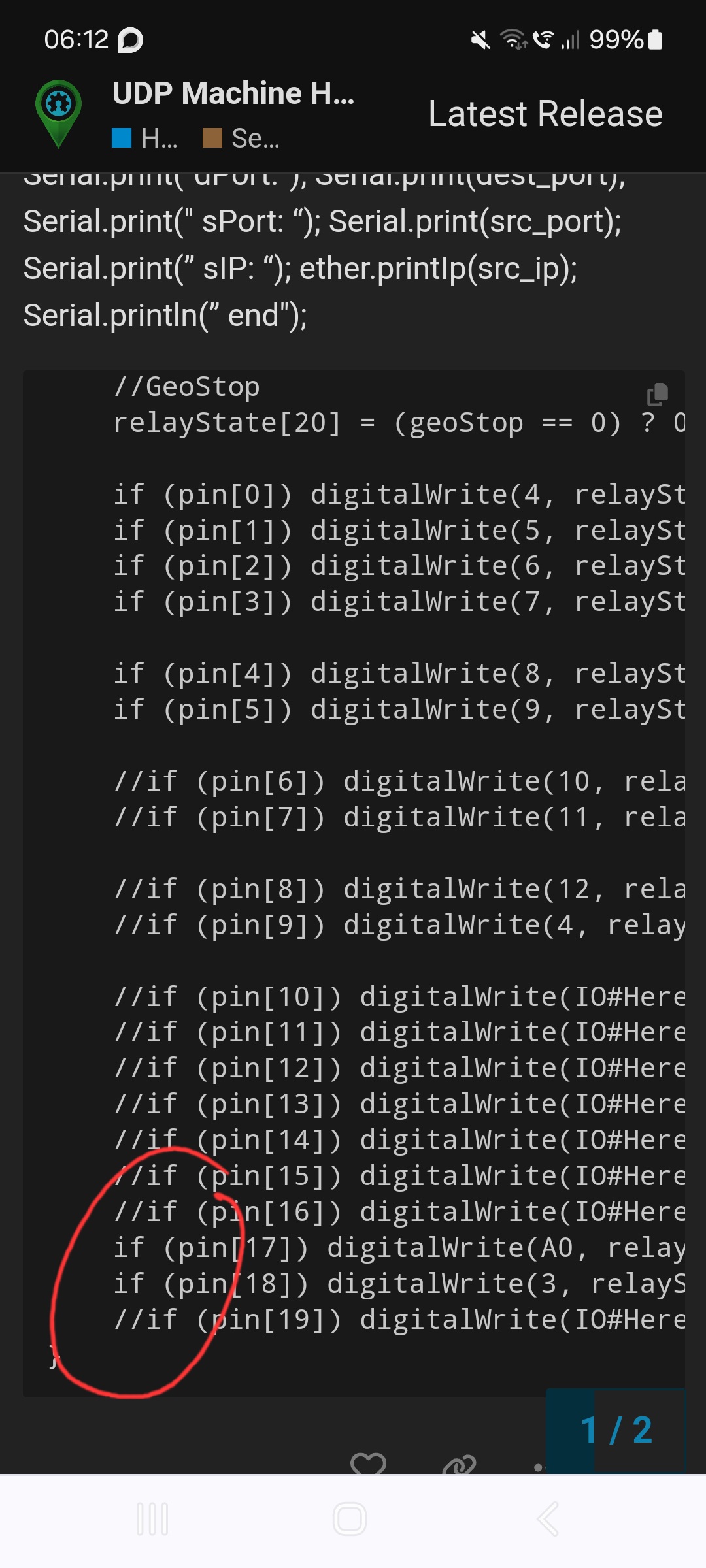
relayState[20] = (geoStop == 0) ? 0 : 1;
if (pin[0]) digitalWrite(4, relayState[pin[0] - 1]);
if (pin[1]) digitalWrite(5, relayState[pin[1] - 1]);
if (pin[2]) digitalWrite(6, relayState[pin[2] - 1]);
if (pin[3]) digitalWrite(7, relayState[pin[3] - 1]);
if (pin[4]) digitalWrite(8, relayState[pin[4] - 1]);
if (pin[5]) digitalWrite(9, relayState[pin[5] - 1]);
//if (pin[6]) digitalWrite(10, relayState[pin[6]-1]);
//if (pin[7]) digitalWrite(11, relayState[pin[7]-1]);
//if (pin[8]) digitalWrite(12, relayState[pin[8]-1]);
//if (pin[9]) digitalWrite(4, relayState[pin[9]-1]);
//if (pin[10]) digitalWrite(IO#Here, relayState[pin[10]-1]);
//if (pin[11]) digitalWrite(IO#Here, relayState[pin[11]-1]);
//if (pin[12]) digitalWrite(IO#Here, relayState[pin[12]-1]);
//if (pin[13]) digitalWrite(IO#Here, relayState[pin[13]-1]);
//if (pin[14]) digitalWrite(IO#Here, relayState[pin[14]-1]);
//if (pin[15]) digitalWrite(IO#Here, relayState[pin[15]-1]);
//if (pin[16]) digitalWrite(IO#Here, relayState[pin[16]-1]);
if (pin[17]) digitalWrite(A0, relayState[pin[17]-1]);
if (pin[18]) digitalWrite(3, relayState[pin[18]-1]);
//if (pin[19]) digitalWrite(IO#Here, relayState[pin[19]-1]);
}