AgOpenGPS
UDP only - Where is AOG heading
Lounge talk
BrianTee_Admin
27 March 2022 16:03
29
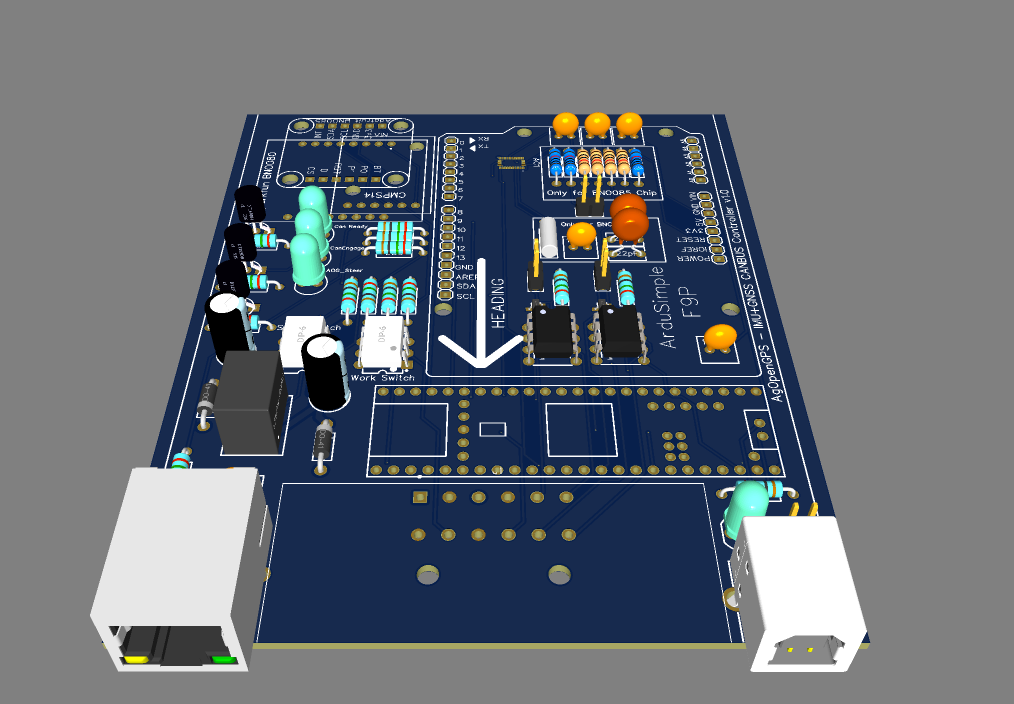
Single F9P and canbus steer.
3Dview
1014×704 120 KB
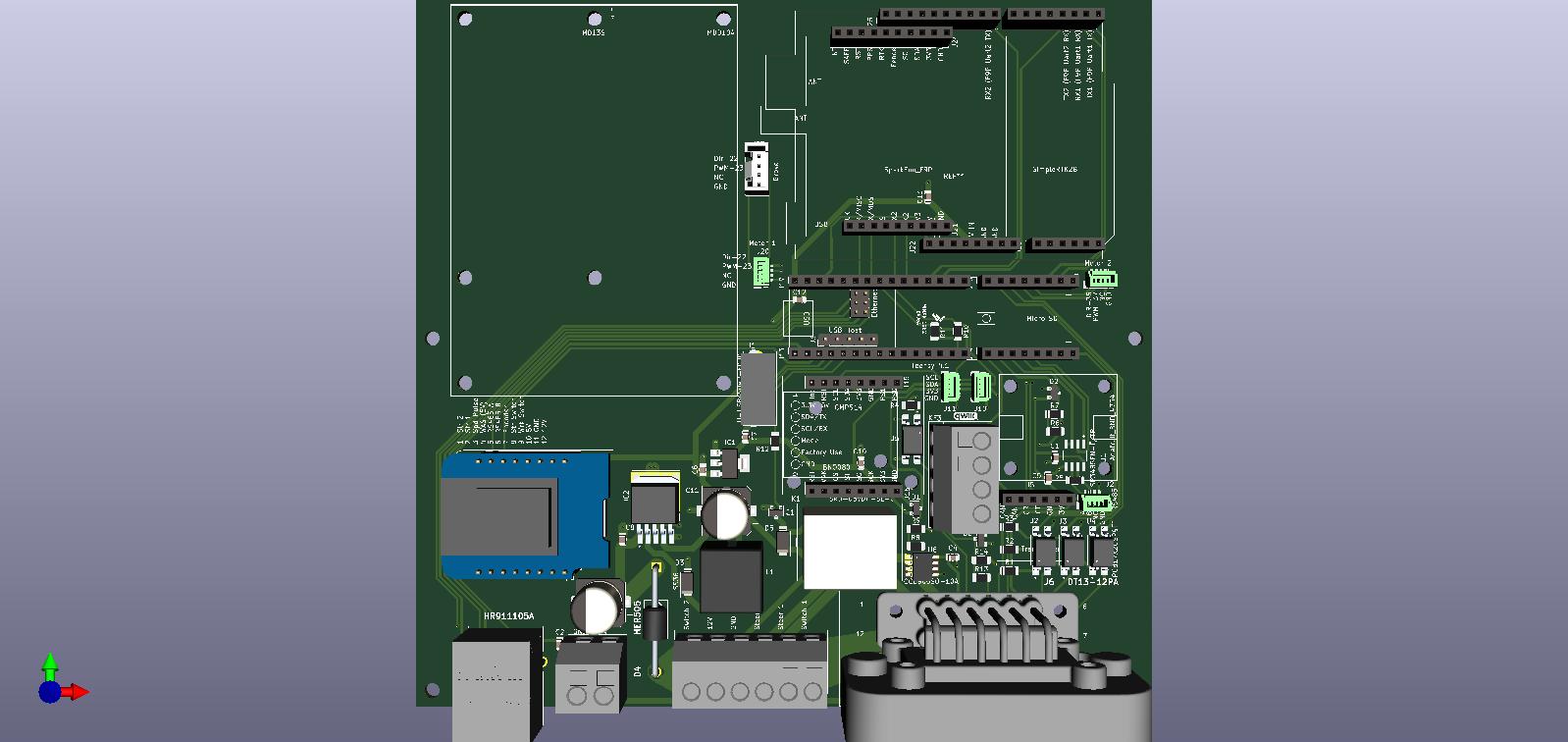
And Davids single design. Some SMD and some soldered.
AS13
1598×756 101 KB
2 Likes
Autosteer Single GPS+IMU+Panda
show post in topic