SOLUTION details:
The solution is for the standard version AIO PCB V2(.5) instead of the originally planned Panda setup.
(Should apply to Reach M2 too.)
- M+ settings:
Set the following settings under Position streaming 1 or 2 on the M+ to:
Channel: Serial
Port: S1 (UART)
Baud rate: 115200 // (currently the closest to 460800,
// the value originally used in the Teensy's .ino file)
Format: NMEA
Message type: GGA, VTG
- Changing the value of the
baudGPSvariable:
Follow the instructions on Configuring the Teensy from the official hardware wiki until you reach the part where you supposed to compile the code and send it to the Teensy then do the following:
Search for the the variable (CTRL+F), currently it’s on line 38.
Change from:
const int32_t baudGPS = 460800;
to the baud rate set on the M+, 115200 in this case:
const int32_t baudGPS = 115200;
then continue with the instructions.
- Wiring
Use the JST-GH 6-pin to jumper pin cable (looks something like this) included with the M+ plug it in the S1 port then connect the wires in your preferred way (easiest way is to plug a pin in to the ends of the relevant cables then connect them to the header on the PCB) to the board’s RIGHT (MOVING BASE) / SINGLE section like this (connectors pinout):
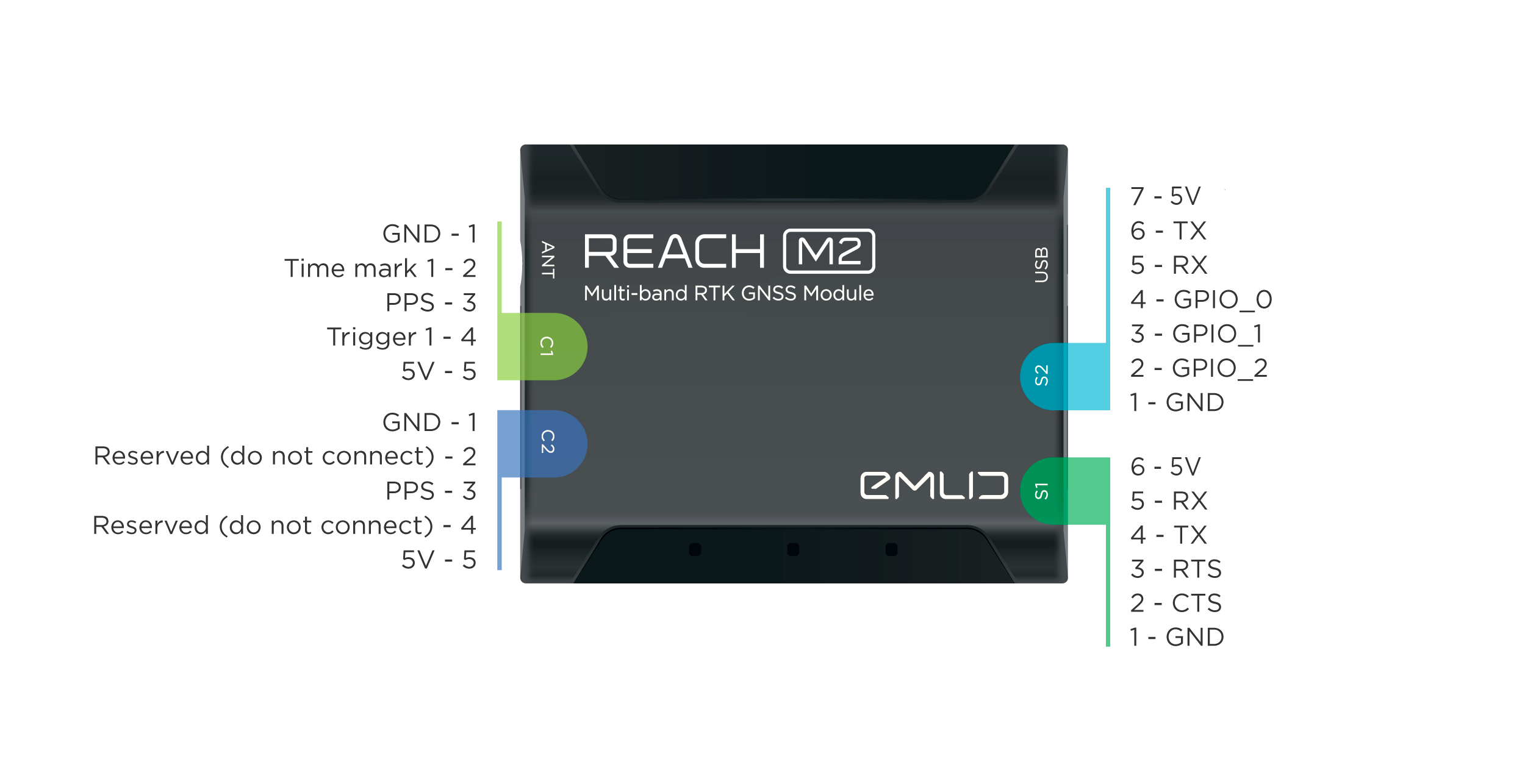{kind=link}
[M+ S1 GND] <—> [PCB “GND”]
[M+ S1 5V] <—> [PCB “5V”]
[M+ S1 TX] <—> [PCB “TX1 (F9P UART 1 TX)”]
[M+ S1 RX] <—> [PCB “RX1 (F9P UART 1 RX)”]
(only works one way TX-TX/RX-RX not TX-RX/RX-TX)
That’s it.
Notes:
For some reason the GPS/RTK led on the board stays red which should mean there’s no RTK, but I have RTK anyways.
I had concerns about the baud rate is going to be too slow at 115200 for autosteer, but after a few days working at 8 km/h it looks like it’s working fine.
Edit: I forgot to thank @PotatoFarmer once again for his help: thank you!