I am not sure who does the code checking and integrating yet, but it would be super cool if it got added. Please test it.
Think it works pretty good as is, but super fine tuning it is slow because I need to make a more efficient test input and output setup on the nano and tablet. recompiling / flashing code set points takes forever.
I am not on the telegram, nor do I know what that is?
Should there be an optional relay shown? Coil is powered by 12v out from PCB and it switches battery power to cytron. This way there less possible issues with stale PCB voltage, the motor can cause voltage droop.
It probably should have a disconnect, or mention of the freewheel mod.
I am using the freewheel mod, so when the ACS712 triggers the kick out, its instantly freewheeling. Without that the motor would lock up once triggered would not be ideal.
When you leave a field without finishing the work and come back, do not take the line of the current pass but take the one of the last pass you made, shouldn’t you mark the line of the current pass instead of the one you already did?
@BrianTee_Admin I was wondering if it would be easy to put in an max engage speed for autosteer. It would be an extra leval of security to prevent engagement on the road.
In my opinion, safety should not be about speed, I regularly work at 30kmh in the fields, and on the other hand in a small path along a ditch or a river and the engagement of the autosteer at 10kmh can be dangerous.
I turn my system clear off for safety but theirs always that time you forget and bump the on switch. Or a hireling who does something stupid. And yes i was thinking a setting that you can set to any speed you want.
maybe a geofence that could be activated or not (sometimes it is useful to use the autosteer outside the field, for the field next door for example).
I realize that each time you want to add a security rule, you take away a freedom… Maybe it would take 2 modes: user mode and god mode!
I’ve had the same thought. Any time the vehicle is outside the field boundary, deactivate the steer switch. Also as speed increases the max steer angle and the max pwm setting should decrease. For example, when driving at high speeds in the field with the sprayer, when I engage auto steer, I don’t want the auto steer to request max steer angle and max pwm, as this would get very violent! This would smooth high speed line acquisition in the field, and also be a safety feature for a situation when auto steer is accidentally engaged…
Just some thoughts I’ve had when thinking about this subject
The advantage of aog over other solutions is that you can engage the autosteer in any position, no matter where you are, even if the line is at 90°. It’s a great freedom but also a problem if you make a mistake. Accidents are always the result of small mistakes put together.
which could be a way of improvement without adding parameters again. An engagement condition may be added in relation to the maximum engagement angle. thus it would be undefined at low speed as currently. then the maximum angle of engagement could follow an inverse curve to the kinetic energy v². so even at high speed engagement remains possible anywhere but only if you are already on an angle close to the line.
A max engage speed. It could turned off theirby not causing a loss of freedom or funcionality. it could accept any speed from 0 to 100 MPH. which i think would cover everybodys autosteering needs.
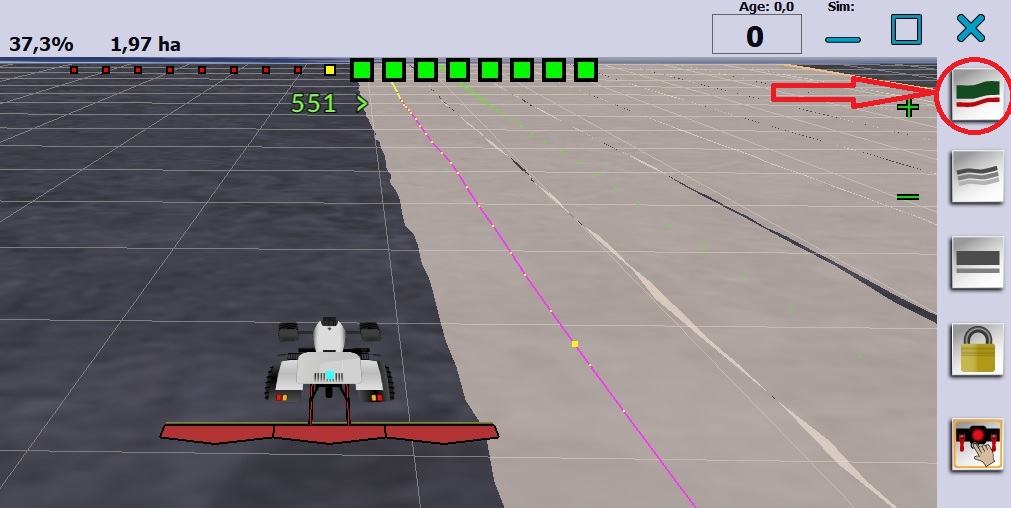
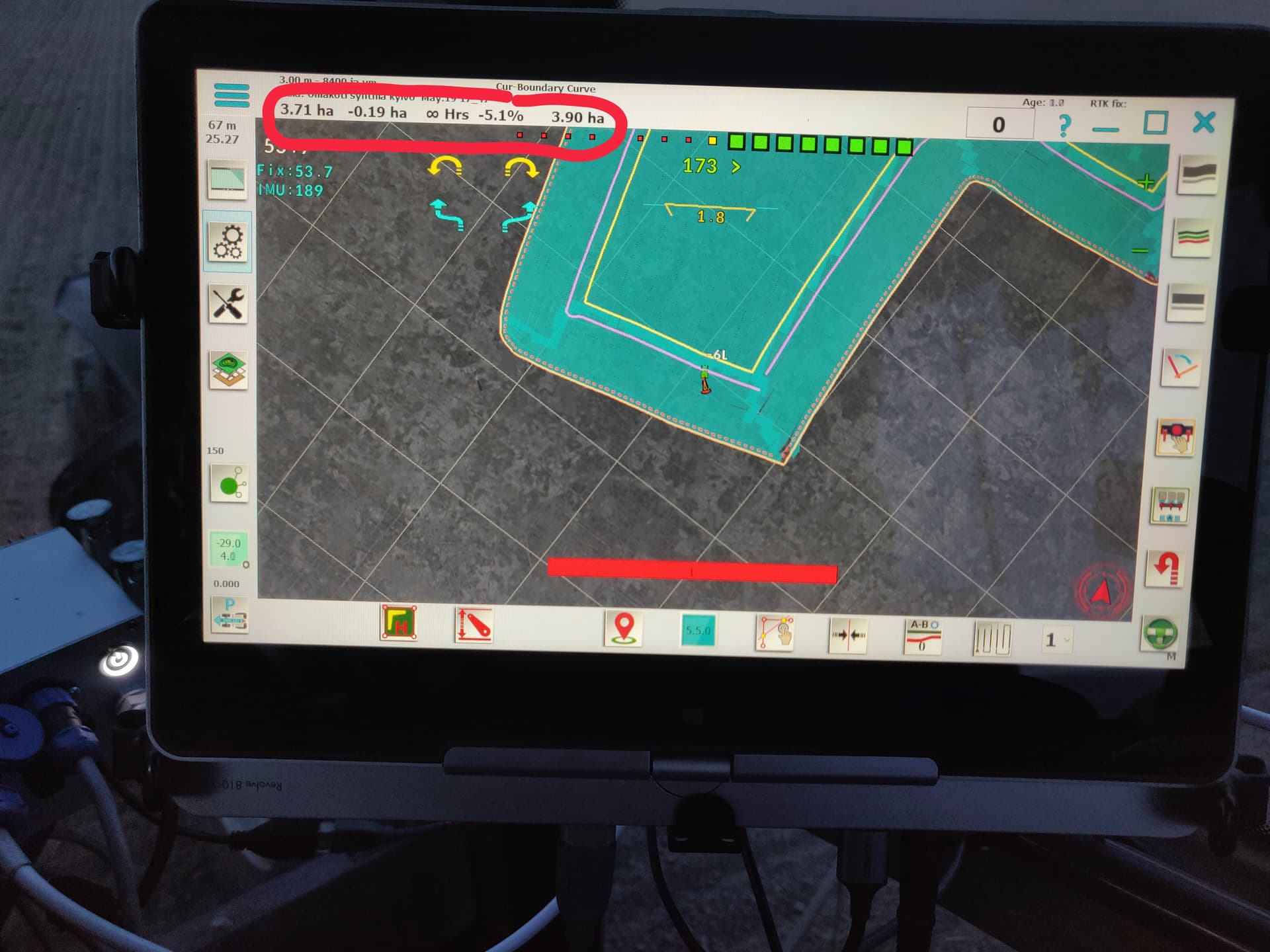
Would it be possible to change the area calculator so that it would show the untreated area that’s left on the field? In my opinion that would be more useful than the total area treated(including overlaps). Or the best would of course be to have them both.