First of all, thanks to all the developers. This is a great program and I have learned so much.
Surely it wouldn’t be hard to add a adjustable maximum speed to AOG. After tipping our planter in the ditch this spring, I’m a little paranoid, and a maximum top speed would act as a safety net for users with a hydraulic system that forget to switch off power to the valve etc.
This one probably wouldn’t benefit very many users, but it would be tremendously useful for me. I would like to see the a/b lines and a/b curves sorted by distance_from_current_position. @KentStuffalready modified a version that does this , so I wondered if it should be added into the main code? Maybe some users would find it annoying?
Yes that would work, but I was thinking something that automatically deactivates the steer switch as an extra safety for the time that you are gonna quick drive to the next field, and forget to close out the active field or switch off your safety disconnect.
I like that idea, more layers of safety can only be a good thing.
As long as it can still be set without a speed limit, or perhaps something super high like 100kmh, for extreme testing
I have tested version 5.4 and it detects when the tractor is going in reverse, a red arrow appears indicating it. I wonder if it could stop painting when it detects that it is in reverse gear so as not to have to turn off the painting “by hand” and not count surface at that moment.
Currently I do not have autoguidance, only visual.
I was referring to a pause in reverse, I do not have pbc installed, only ardu and tablet with AOG, so in manual you have to turn off the button on the tablet to stop painting. I do not know if it could be included as an option to do it only in reverse gear, since it is assumed that you are doing the maneuver and you are not sowing, fertilizing, … etc (google english)
All the PCB does, is putting an optocoupler before the nano pins to protect nano.
Just drag the correct pin low with a contact, and you have the function in your setup.
Realistically shouldn’t every install have a layer of fail safe safety over and above AOG? A pivoting wheel motor is obviously completely fail safe if it’s not on the wheel. My CAN bus 724 disables itself independently of AOG on several conditions. Steering wheel movement being one.
A hydraulic system with only AOG automatically disabling it is a worry IMHO. Especially if that is the only level of disengage that is INDEPENDENT of operator action. Especially unsafe in a situation like slurry tanking where in and out of field is a regular part of the job.
A switch that runs the v2 relay or a switch in place of the v2 relay, either give 100% esd. I highly recommend.
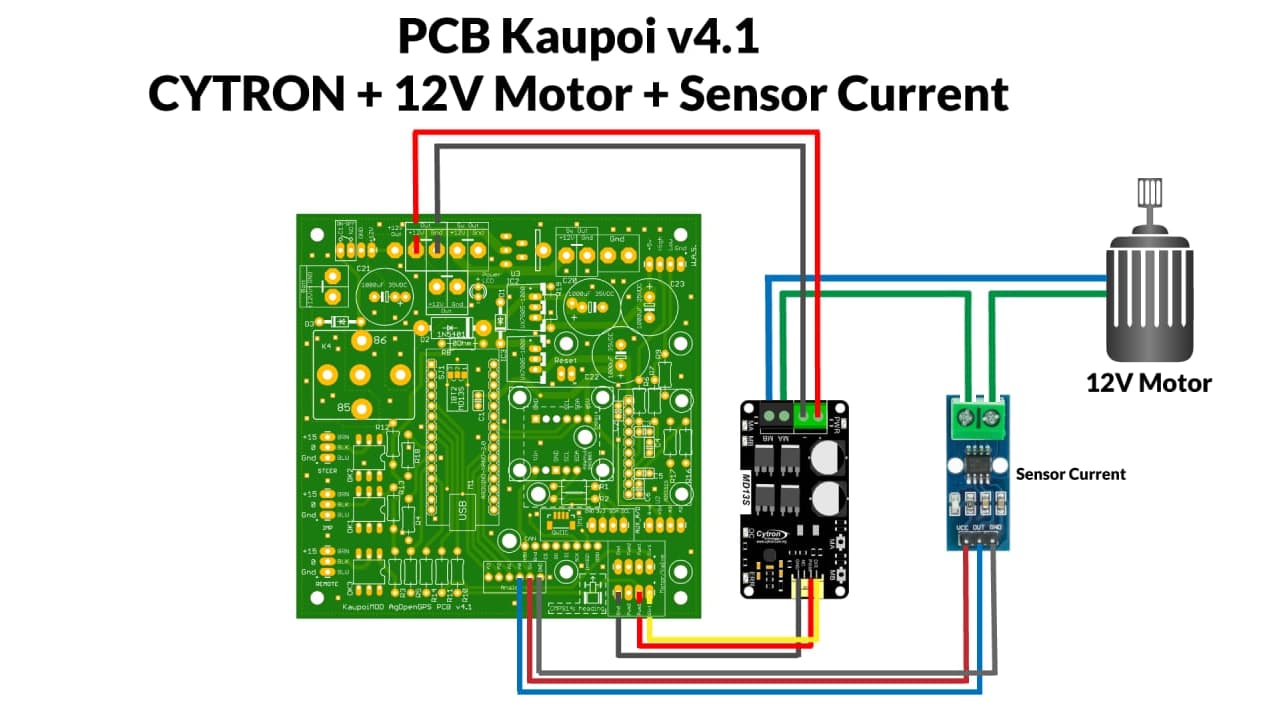
Steer motor also has the ACS712 option, I have posted code that makes it compatible with uturn.
For hydraulic you can add a pressure sensor.
Though I want to try disengagement on pwm rate of change. Holding the steering should cause pwm to spike vs being free and taking smaller steering steps. All dependant on how AOG ramps up pwm though.
// ACS712 disengage, Use current PWM value as percentage to add some extra amps while U turning.
// To get more setpoint resolution between amps 10.5 amps (sensitivity) would be entered as "105" on the settings page
if ( abs(analogValue - 512) >= (steerConfig.PulseCountMax * ( 1.2 + (abs(pwmDisplay) / (steerSettings.highPWM - steerSettings.lowPWM))* 1.1))) //amp current limit switch off
{
steerSwitch = 1; // reset values like it turned off
currentState = 1;
previous = 0;
}
}
It works very much like the original ACS712 code, but instead of entering the set point value as 10, you now enter it as 100. This allows you to have finer set point adjustment. before you could only pick “10 or 11”. Now you can pick “…100,101,102…109,110,111…”.
Also the last pwm is divided by the pwm span as a percentage to keep the set point hovering above actual output amps. It works well, of course probably could be even finer tuned but it got too cold. I was happy with the way it was functioning for 2 days, it worked throughout the u turn and would disengage within it.
The ACS712 goes in series with one of the motor output wires, the analog from it goes to A0 on the V2 board.
But it also got me thinking maybe the ACS might not be needed comparing pwm rate of rise, but that is still just a theory.