and how to set them correctly, what logic should I follow when it works? let’s say I approach an obstacle and my speed drops to 5km/h. the pressure becomes almost 0 and the nozzles do not spray. how to set it correctly. because when I enter only the speed, the system does not respond and drops to 0, when I enter a fixed value, the system raises the pressure to infinity when the sections turn off one by one
There were some errors in the code. It is fixed here: GitHub - SK21/AOG_RC at PIDdata · GitHub
There is currently no protection for over-pressure. UPM minimum should be set low to avoid this.
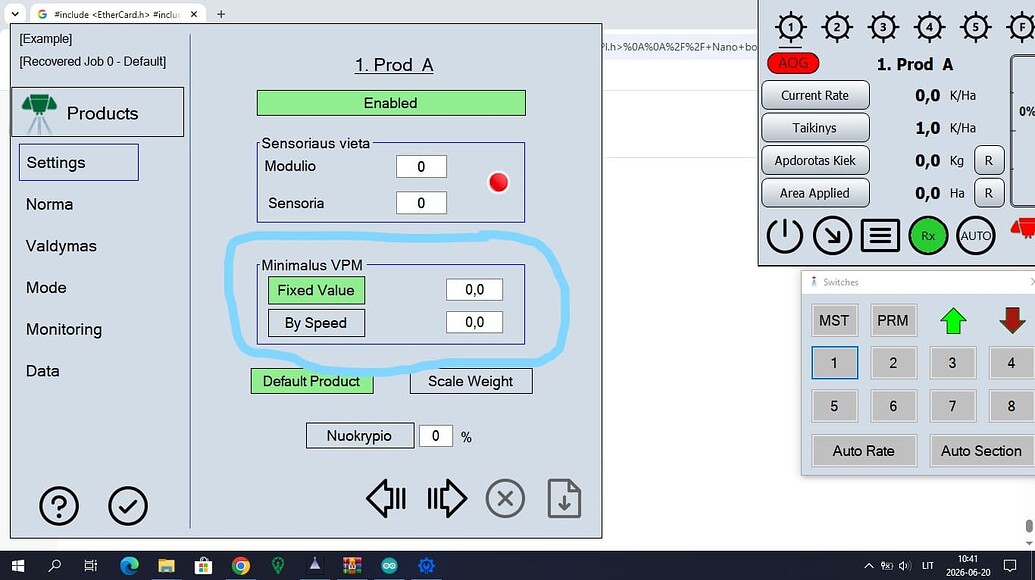
This display is changed in the new version. The old version Fixed Value is the minimum upm. The controller will try to keep the minimum upm. Using “By Speed” it calculates what the minimum upm would be at the given speed using target rate and machine width. The “By Speed” was broken in the old version. It is fixed now.
Thank you