I just tried the two TM171 on the tractor. Angle was really stable over several minutes, but i only tried it on the road and not on the field. I also adjusted the gain of the accelerometer to 3.5 (from default 2.08, according to the datasheet it is recommended to increase it for shaky environments).
Did you experience any major problems with the TM171 in the field? As you previously mentioned that the heading is really stable in your first tests?
Dual TM, dual BNO085, and BNO85+TM will work. I have them in every possible combination, and they all work great. Better than any installation with a mechanical WAS, and I’ve installed over 1,000 AGOPEN installations on various devices.
If the shipment is to one place and the invoice is for one person, we can definitely send it in a collective package to the States (this will be very beneficial for you in terms of shipping costs)
Hello. Could you make a complete wiring diagram with two bno085 so that everything is in one place with installation instructions and connections to the pcb. the whole complete diagram. Thank you very much
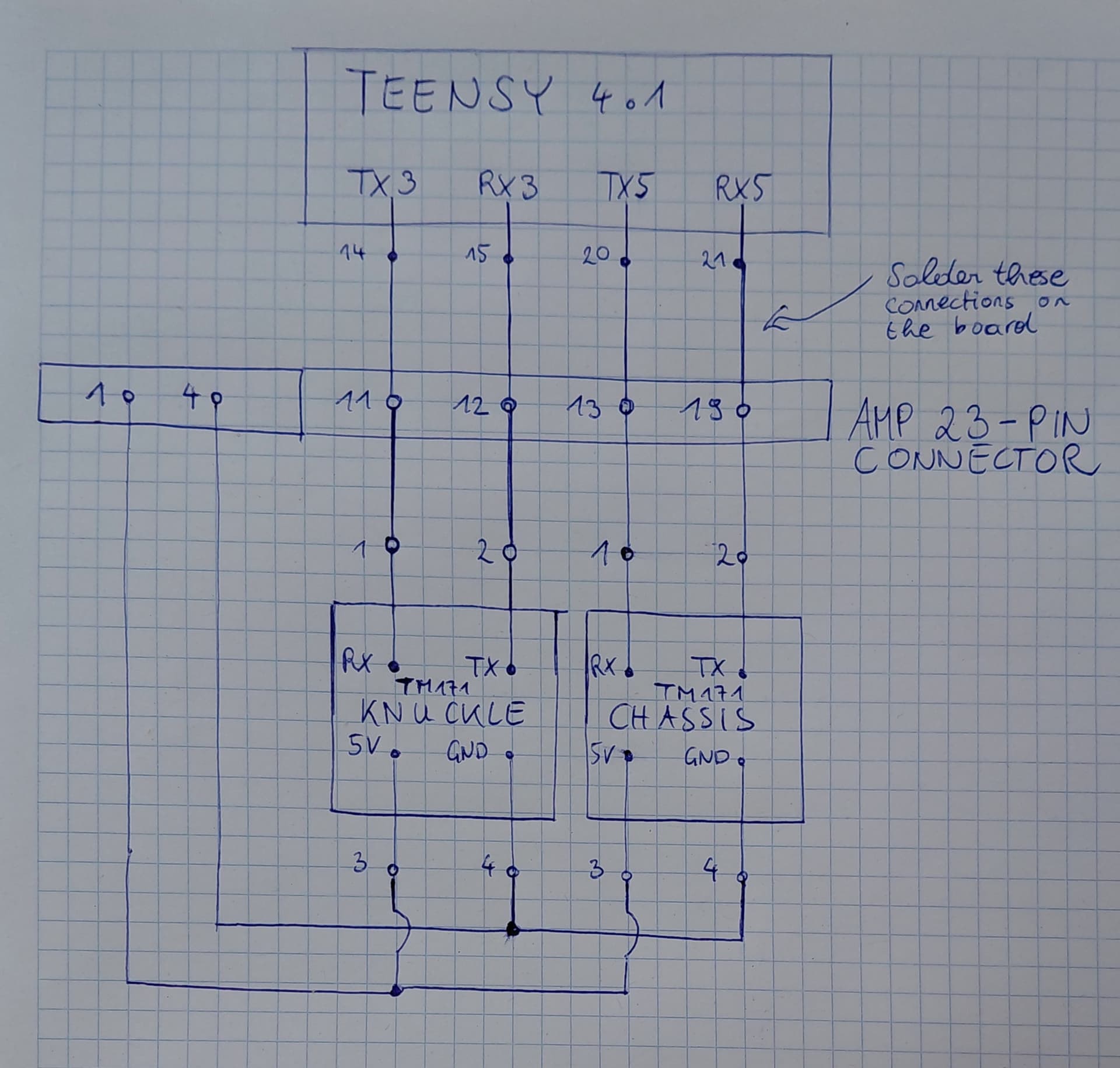
Here is a basic wiring diagram using two TM171.
The goal is to connect the serial pins of the Teensy to the serial pins of the TM171. We also connect 5V and GND from the board to the TM171.
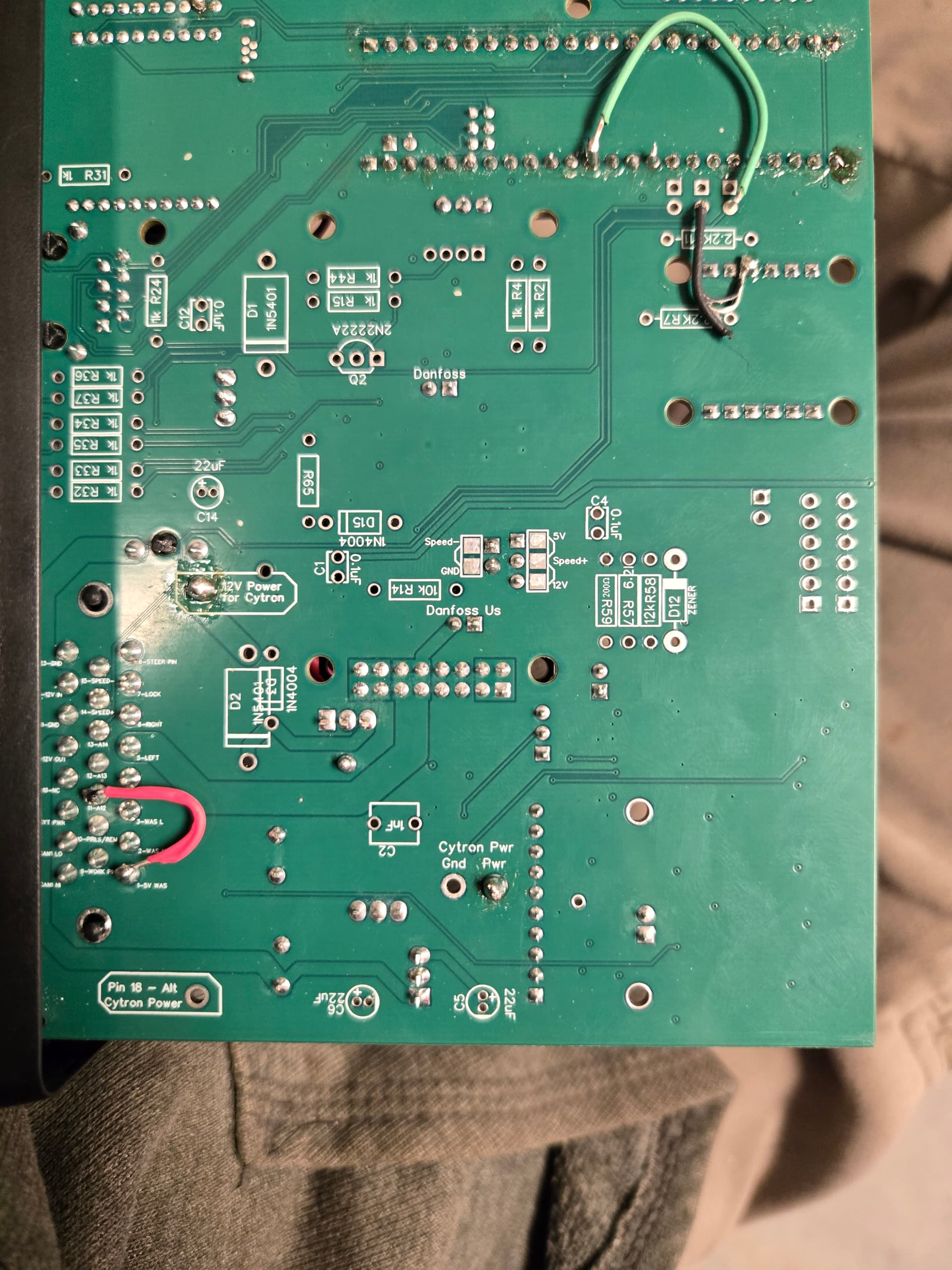
Therefore I soldered wires from the teensy solder pads to the 23 pin connector.
Code could be improved to display the pwm value (currently you only get pwm=0 displayed) correctly. For that, the pwmDisplay variable should be updated in the keya section.
Both tm171 are only used to calculate the wheel angle.
Heading and roll is calculated by the dual antennas, which are both really stable with dual (other advantages of dual are described in the forum). However you can change that setting in the agopengps software (if you want to calculate roll from dual or imu).
If I am not mistaken, it should even be possible for dual antennas to use the heading and the knuckle imu only to calculate the steer angle. This is not implemented yet, but i think it could work in theory.
I think it will work without any problems with the dual rate, and e.g. bno085, the code is easy to adapt, when I have a vehicle with a dual antenna at hand, I will test it.
I would be interested to see how that performs. In my current set up with a BNO and TM171 (as the knuckle), I have the AIO board floating around the cab. Should it be set up fixed and in the correct orientation (arrow pointing forward)? I know I have read that dual GPS didn’t need the MCU to be fastened down, but I assume that was with them using a WAS on the wheel itself. Should I have this fixed somewhere in the cab with the correct orientation?
Yes the pcb needs to mounted flat if using a imu.
The orientation of the imu needs setting in in the imu section x y axis and roll invert can all be swapped depending which way your board is facing forwards
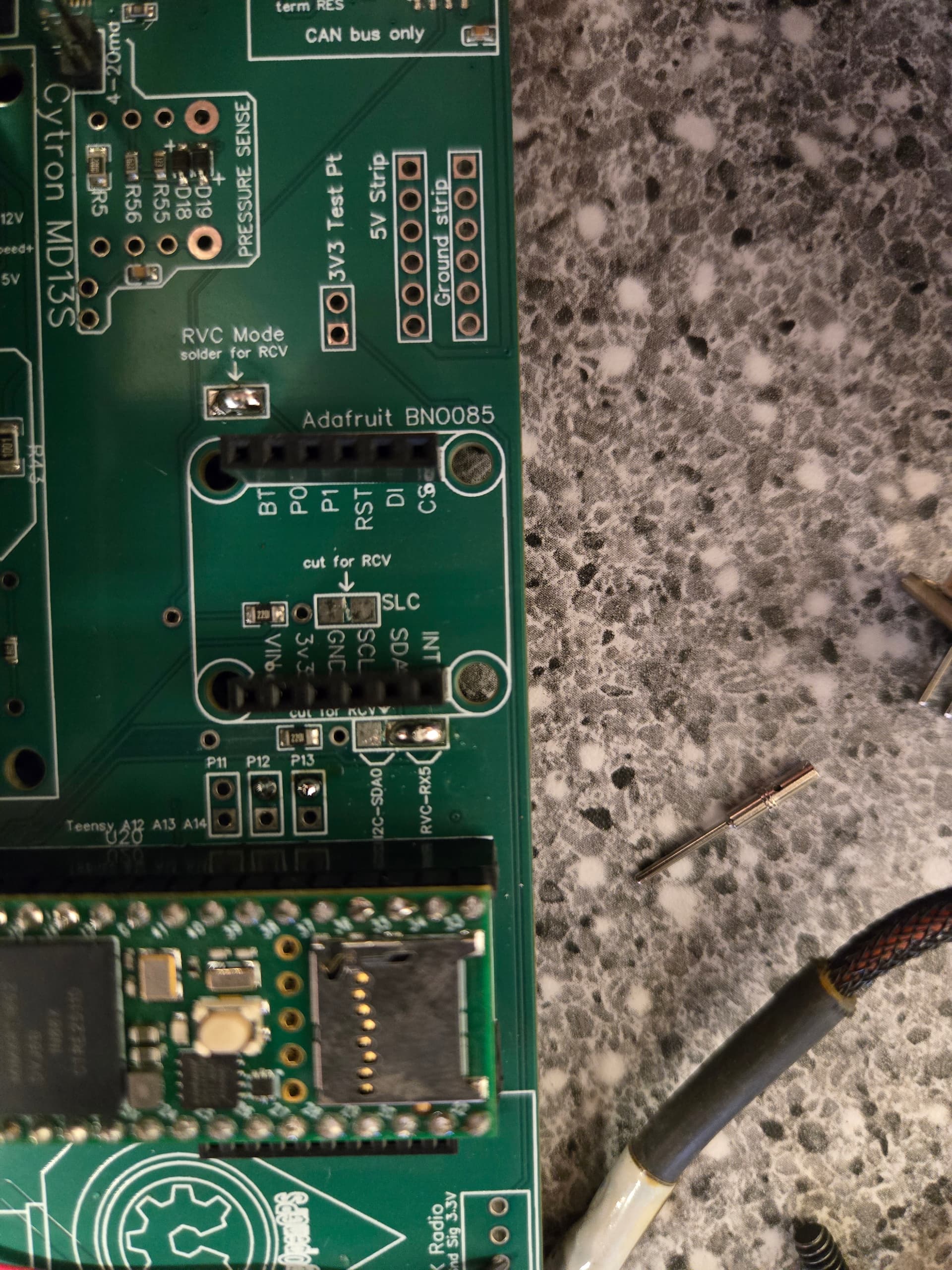
Do i have the correct spots soldered?
Does the bno085 on the board need a wire from 3.3v to p0?
I did power everything up and both bno’s light up with power. Nothing shows in agopen, neither roll or WAS. IMU doesn’t light up at all in AgIO, but gps and steer light up green.