I did end up getting my bno setup working. I had loaded the wrong teensy firmware. Really cool!
Which firmware should I install? I have the same issue with another one as well. Also, does the BNO085 on the board need to enter RVC mode? After flashing the firmware, the GPS stopped responding. I don’t know what went wrong.
If you have 2 BNO085 I used this firmwarehttps://raw.githubusercontent.com/MarekJarczewwski/AgOpenGPS-Teensy-4.1-Dual-IMU-WAS-BNO85-or-TM171-/refs/heads/main/AIO_v4_FirmwareWASBNOkorektaBNO.zip
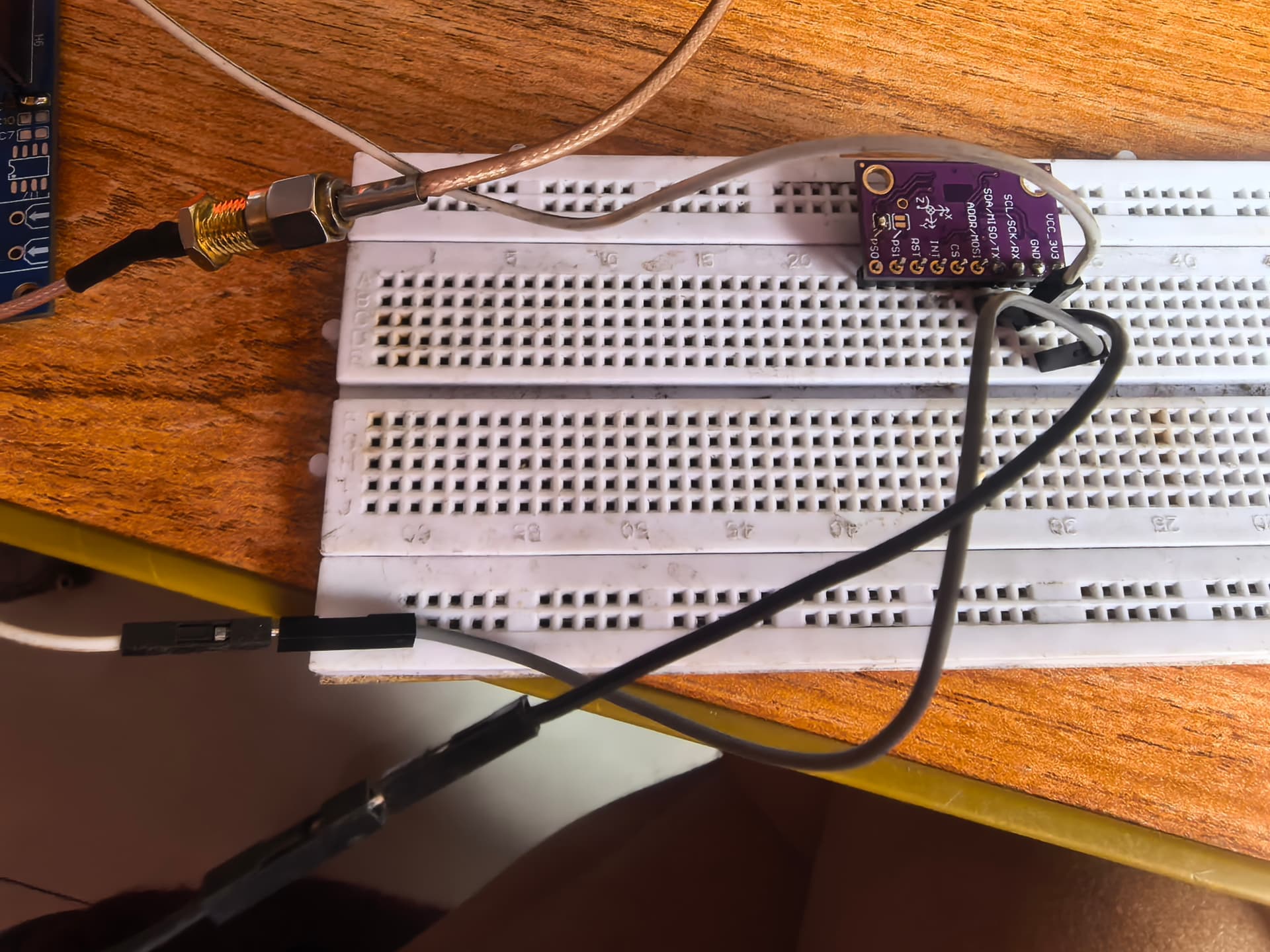
On the board just do the RVC mods like I did in the pictures above and the wires on the bottom of the board. 2 traces to cut and 2 to solder. Nothing need done on the actual bno on the board. The bno on the axle needs a wire soldered from 3.3V to P0 I believe and that puts it in RVC mode.
I successfully flashed the firmware. The WAS is working fine, and the 085 rotates with data changing. However, the GPS and IMU have stopped working — no data at all. I’m using a board that includes a GPS module. Could that be related to the issue?"

You could try tapping “set subnet” in udp settings. Sounds like an ethernet problem?
Does the wheel bno get wired to the same pins as a regular WAS on Amp seal plug ? Or which pins does it connect to?
I used some empty pins on the ampseal 11, 12 and 13 I believe.
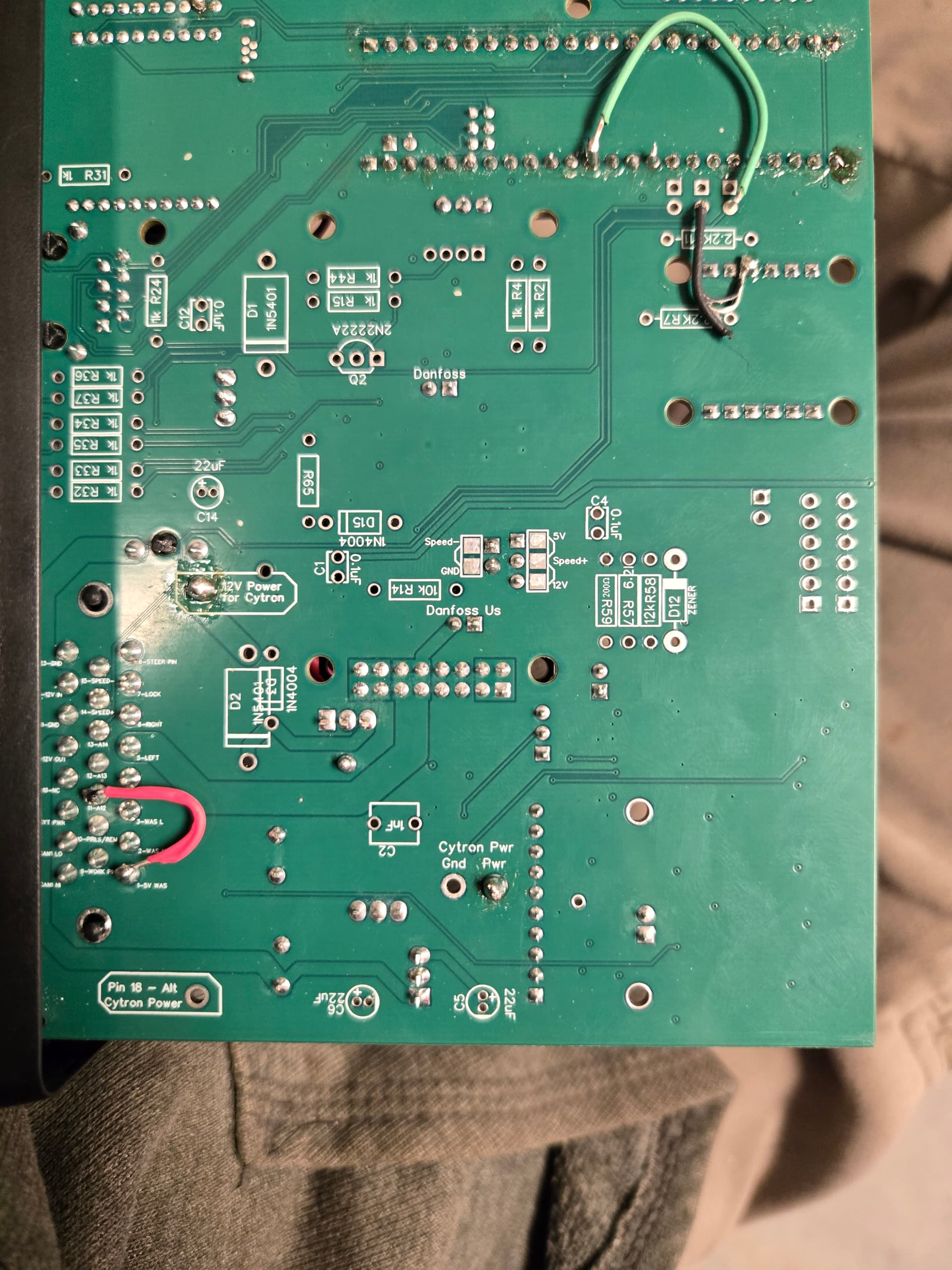
The green and black wires are soldered to traces that go to the pins above 12 and 13 I believe. The red wire just bridges 5v to pin 11.
Thanks
Mat. How have you found using the dual TM171 your modified codes for the Keya. with using the TM171 units that will mean that you can mount the PCB board anywhere now instead of flat on cab floor?
Ive used a tm171 as imu remotely. Used a 1m 3 core cable back to the pcb. Meant the pcb can be mounted anywhere and a small enclosure to mount the tm171 flat
If you place the TM171 on an adapter and plug it into the F9P socket, you’ll need to place the board flat on the floor, just like with the BNO. If you pull the TM171 out of the controller, you can do whatever you want.
Has anyone implemented it on UM982 dual antenna? I’ve connected it today, BNO as WAS works, but I am missing roll right now.
Ok, managed to make it work by merging UM982 code by chriskinal with baraki’s code ( added all the WAS lines). Now by looking at the code, or the lack of presence of IMU be the problem for WAS? There is calculation of delta between yaw of IMU and IMUWAS. Thanks for any response.
Actually, I didn’t test it driving, just turned on the navi on turned off tractor, but had the angle of IMUWAS and roll.
@edit Okay, so after testing the WAS is constantly zeroing, even when hard turning. Also after making 180 degree turn the WAS shows crazy steer angles like 120 degree.
Do you have an IMU installed? you need it for the WAS to work
Yeah, that’s the issue. I think if is it possible to use the roll, pitch and heading from antenna to use with IMUWAS.
Have you tried this on a 4wd articulated tractor? I have an articulated tractor that had trimble and they used the IMU WAS which was mounted on the front of the rear part of the tractor. Where would be the best place to mount on an articulated tractor if using 2 bnos?
Good Afternoon,
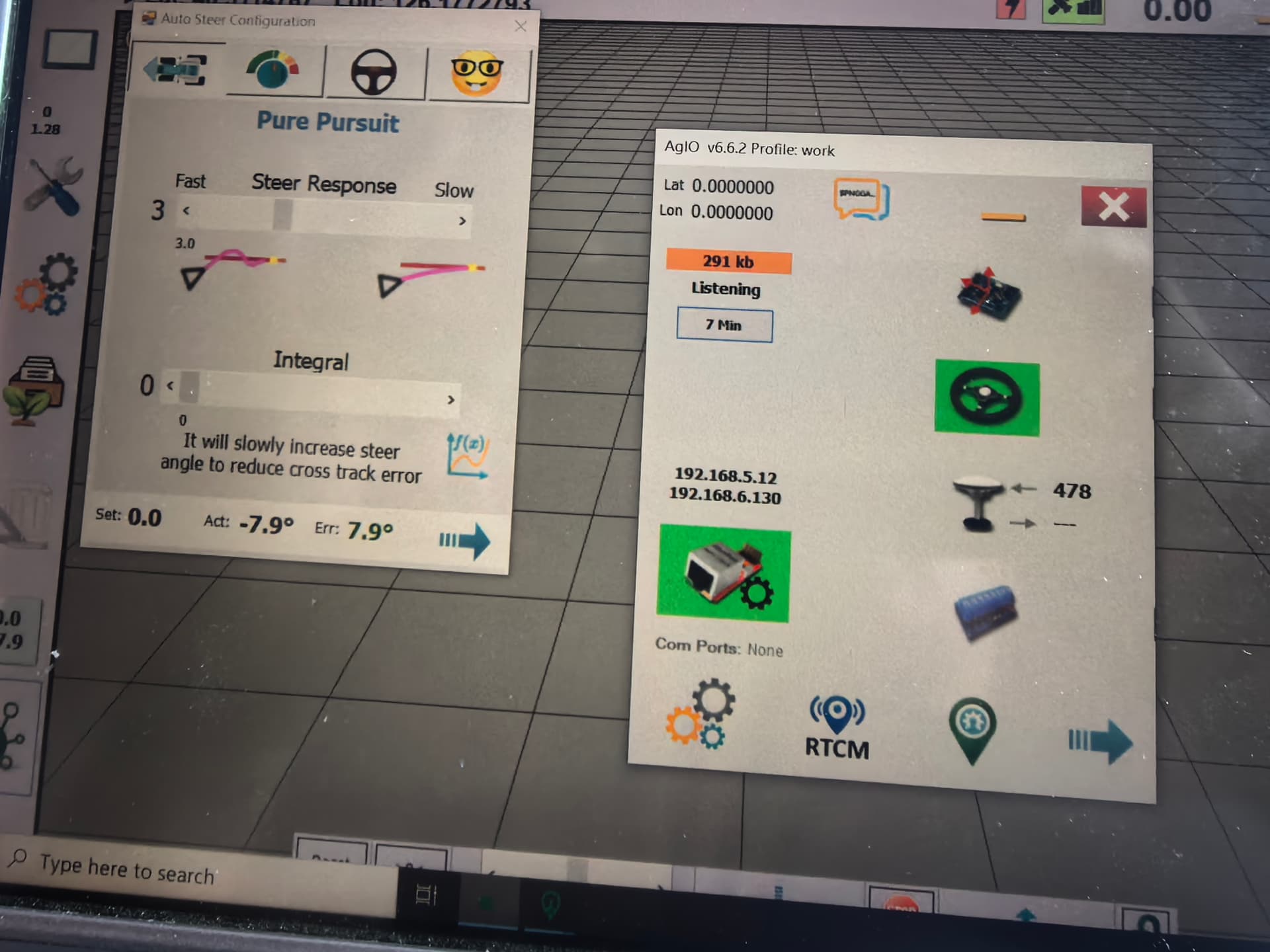
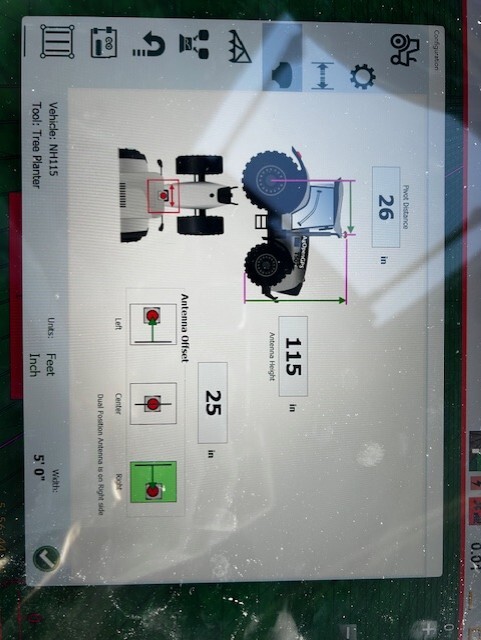
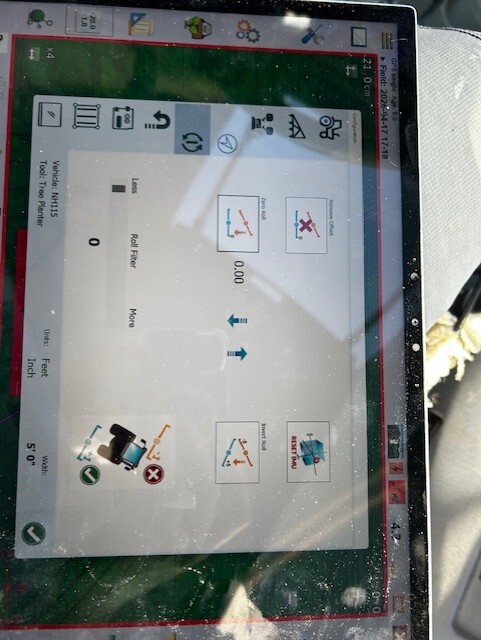
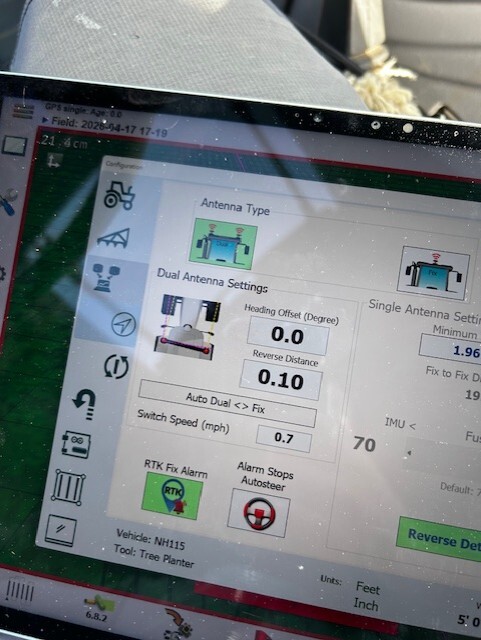
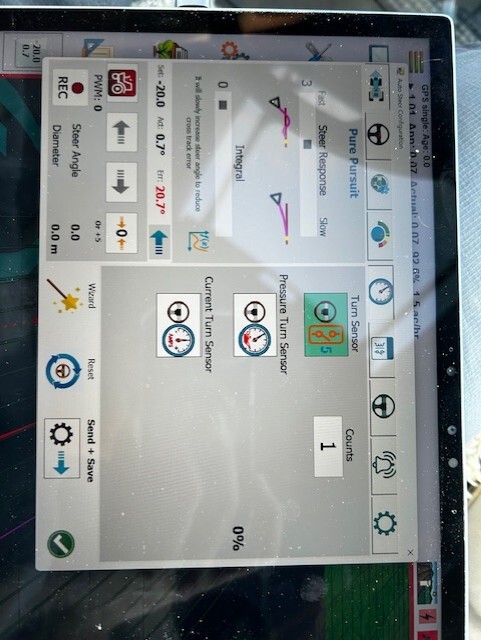
Looking for some assistance here. I have TM171 as WAS and BNO085 as the IMU in the cab. Currently using the testing software (TM171asWAS_Synchro_Test). I am getting no feed back from the IMU on the display, no angle is showing. I have tested another version of the code, with no luck. As I move around the field my tractor looks like I am travelling on a diagonal, orientation does not seems to change. This is a Dual antenna set up as well, I’ve attached some of the settings I have. Not sure If i missed something here… I have tried to go through the autosteer set up, and had no success. Sometimes the angles are too large for the calibration to be successful, and it never recognizes roll settings from the dual antenna set up. Would love some assistance in trying to get this back on track. Thank you.
I had the problem that i made a mistake in the wiring, then the Wheel angle didnt show.
Make sure you have wired TX from the teensy to RX from the TM171. And RX from the teensy to TX from the TM171.
I’m going to put both BNOs in a enclosure with the circuit board. The enclosure will be in the cab. My theory is that you want it forward of the hinge aligned with the nose of the tractor. I’ve got it put together on my workbench. If it works as well in the tractor it will be a real win.
1 Like