Hello! Is the circled part necessary?
1 Like
Hello, no it is not as we mesure the amps before the cytron
2 Likes
Can it be implemented in the Arduino “Autosteer” ino? Or should it be an extra arduino?
Regards, Peter
It seems that they are implementing just that, and I am sure that it´s worked out before v5 is ready.
1 Like
Good Morning. I am new to this forum, I have read a lot of information about agopengps, but you could tell me what is the minimum hardware to do an autosteer test. I have a mega auduino and I would like to do the test with it. with an Arduino mega, a cytron controller or an itb and a motor would it be worth to do an autosteer test, without building a pbc?. I hope my questions are understood, I am translating with a program, I do not understand any English. Thank you.
most likely this seems possible, but it’s up to you to find out the pinning and (maybe) the necessary adaptations
I have been trying to get the ACS712 to work through an entire U Turn, I have had some success. Its not as buttery feeling as I would like it to be but its as good as its going to get this year. My tractor has no cab someone in a warmer climate can go have some fun with it.
// Use PWM value as percentage to add some extra amps while U turning.
// multiply disengage setpoint proportional to output to allow u turns. 1.3 is base multiplier, 1.2 is scale factor for adaptive ramp.
if ((abs(analogValue - 512) / 10.24) >= (steerConfig.PulseCountMax * ( 1.3 + ((abs(pwmDisplay) - steerSettings.lowPWM) / (steerSettings.highPWM - steerSettings.lowPWM))* 1.2))) //amp current limit switch off
{
steerSwitch = 1; // reset values like it turned off
currentState = 1;
previous = 0;
}
}
I can U turn with this, disengagement is still a bit stiffer than I would like but it works. Tested it disengaging in the U turn and it worked. There seems to be a small bug with the ACS712, the first time you engage auto steer it kicks it out every time, but after that no issues.
In typing this just realized that dividing pulse count max by 10, would give 10X more resolution of the set point as entered Into the computer. That is my next route in fine tuning this.
1 Like
Is there a way to have different parameters when driving normally vs when in a U-turn? That way in normal operation disabling would require less effort, but during a u-turn it would require more force. Probably not at present, but might be worth adding a PGN to indicate that a u-turn is in progress.
There is a flag for u turn in the nano, not sure really if it flags but its there. Need to find a better way to interact with the nano during operation.
But the set point has to scale with the output to keep set point hovering over current current output. With the code above you have to noticeably pull or hold it to disengage. Keep in mind I only weigh 165lbs, If perfect was 20% force over normal steering, its at 35% right now in all modes.
I froze a bit tonight but got it all ironed out. The reason for the random disengage was my original snippet allowed the set point value to go negative. I am extremely happy with the results now using the ACS712 straight or in a uturn.
// Use current PWM value as percentage to add some extra amps while U turning.
// To get more setpoint resolution between amps 10.5 amps would be entered as "105" on the settings page
if ( abs(analogValue - 512) >= (steerConfig.PulseCountMax * ( 1.2 + (abs(pwmDisplay) / (steerSettings.highPWM - steerSettings.lowPWM))* 1.1))) //amp current limit switch off
{
steerSwitch = 1; // reset values like it turned off
currentState = 1;
previous = 0;
}
}
Also tonight I learned the difference between my Chinese brt10 tablet, and Getac f110 G2. Though the brt10 runs AOG well especially going straight, I was still having some odd U turn and Contour guidance overshoot issues. The Getac runs U turns much more precise and extremely smooth. I thought AOG was great before, but I cant get over how smooth, slow and methodically it moves the steering now.
3 Likes
Do you think a pc with more “horse power” can make autosteering better?
I think what is going on is comparable to PC’s and video game frame rate.
The higher power tablet is able to crunch the numbers faster so it keeps up with each scan required and the result is smoother without any dropped “frames”. The wheel turns slower during u turn but more accurately.
The BRT10 gets its processor loaded up during Uturn and ends up over compensating, because its not able to keep up with the higher demand. The wheel whips to keep up between “dropped frames” and overshoots more.
All AOG tuning settings are the same. Only difference is the tablet used.
The test that will for sure prove this is seeing if there is still a long pause between contour segments during boundary guidance on headlands.
3 Likes
Now you scared me. I was thinking about getting an ASUS TH101A, BRT10. I think I’ll pay more and get a GETAC. Or some tablet or 2-in-1 notebook with i5>i7 processor with 4GB<=8GB ram
You don´t need an i7. I am running AOG v5 very well on a Dell Venue 11 (dell venue 11 pro 7140 m-5y71)
It is fan-less, so no dust inside!
It has almost 400 nits of brightness (I still need to buy an antiglare protection sheet for it) I think it is all right in daylight but not direct sun.
Ive had a good time with the getac G2, I am pretty sure a Panasonic would be no different.
Sold the getac G2 and dock already to the friend I farm with, after seeing that my lawnmower was outperforming his fleet of Trimbles.
Found a used G3 f110 and dock, so already upgraded. But now its too cold to play with, bench testing only.
But as for boundary guidance with the f110, it worked smoother overall, but still does some mad line hopping. I think this feature requires a bit more development. It either works, or loop de loops nothing in between.
Sorry I know this is not the subject of this topic. But to clear up some doubts:
1/ HP ElitePad 1000 G2 10.1" 64GB Silver Tablet with 4GB RAM Memory
2/ Hp Pro Tablet 608 G1
3/ Tablet Windows 10 W11 Pipo 11.6 8gb +128
4/ ASUS TH101A,
5/ BRT10.
What is the best way to run AGOPENGPS?
Biggest consideration of all is screen brightness, the brt10 was only 400nits. Found this insufficient under canopy, especially at sunrise and sunset. Full sun completely unreadable. Also found its very jumpy in uturn in back to back test.
Got a used F110 because they have 800nits brightness. Can see it very well under all conditions under a canopy or in cab. Only have moderate washout reading in open station direct full sunlight but still very usable. Added bonuses were being rugged, more responsive and larger touch screen and great cab mounting options.
Buy for the max Nits. Being able to see the screen under all conditions really is the most important.
i7 with 8gb of ram runs this program without compromise.
1 Like
Ask google about speed: UserBenchmark: Intel Celeron N2930 vs Core M-5Y71
The speed of the one I use versus BRT10 processor, and I see why potatofarmer say it is too slow.
Meaning Celeron -N2930 is too slow to consider!
In a tractor with cabin, direct sunlight is not a problem I have noticed with only 400 nits.
In windows joblist AOG and AGIO both takes about 10% (5 to 15) of CPU usage, when driving in field with U-turn active. (Correct I did not check % CPU when doing the U-turn, but did not notice jumps in frames)
So you must compare nits, speed and price to find what suits you.
2 Likes
I searched and found something about disengagement.
1 Like
Ag Open has this pricing beat, lol
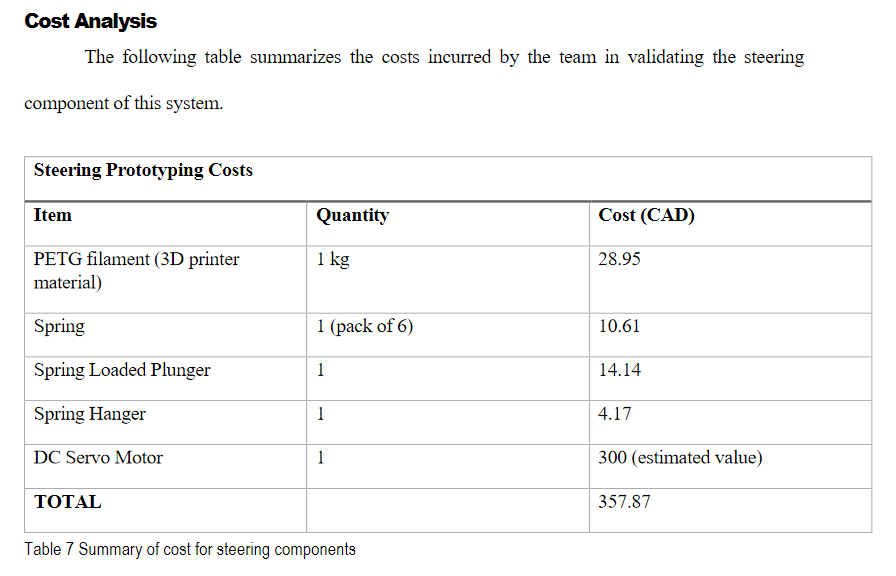
I read cover to cover, disengagement is only mentioned as a needed item twice, but no mention of how to pull it off. They reused a trimble Ez steer motor for the tests, and did spend a disproportionate amount of time back calculating why it works. Very good report hopefully they got a good mark on it at school, AOG is light years ahead of this project, other than the camera guidance portion.
3 Likes