I have built an autosteer system using the dual board, but using a BNO085 instead of the dual receiver. This is all working correctly. However I am having issue getting the autosteer settings so that it will drive a straight line. No matter what settings I use in stanley or pure pursuit it will wag back and forth. The steering error seems to always be high.
I have adjusted P gain. I have adjusted I gain. I have adjusted look ahead etc. I don’t think there is anything I haven’t adjusted.
The WAS that I have is a 360 degree unit so I am only getting about 1V delta across the sweep angle. This results in a count setting of 33. I wonder if this is the issue or not. I am going to buy a 90 degree sensor unit but I wondered if this will actually help or if the 360 unit is the culprit. I can try to get some video later this week. I did not have a way to capture video when testing today.
It is a panda board. Tractor is a John Deere 8220 MFWD. I don’t have a picture of the WAS setup at the moment.
Best performance came with PP look ahead set to 5 and speed look ahead set high also. The look ahead point was way out in front of the tractor.
I tried this on an AB line and on a recorded path. Both AB and path had the weaving drunk pattern to the autosteer. The error between actual wheel angle and required commanded wheel angle was always fairly high.
This is with the panda autosteer dual board all in one.
With 1 v it seems your only use around 75 degree, so better buy a new was. Or make new setup increasing used angle to some 160 degree.
What is your GPS Hz set at. 10 or 1 hz.
Check incoming speed in information that you get when clicking on speed icon.
Ok we will still go through the crazy driving checklist for PANDA.
Is simulator turned off
Did you configure the F9P with Andreas rover 10hz file
Do you have a fix
Did you press send to nano
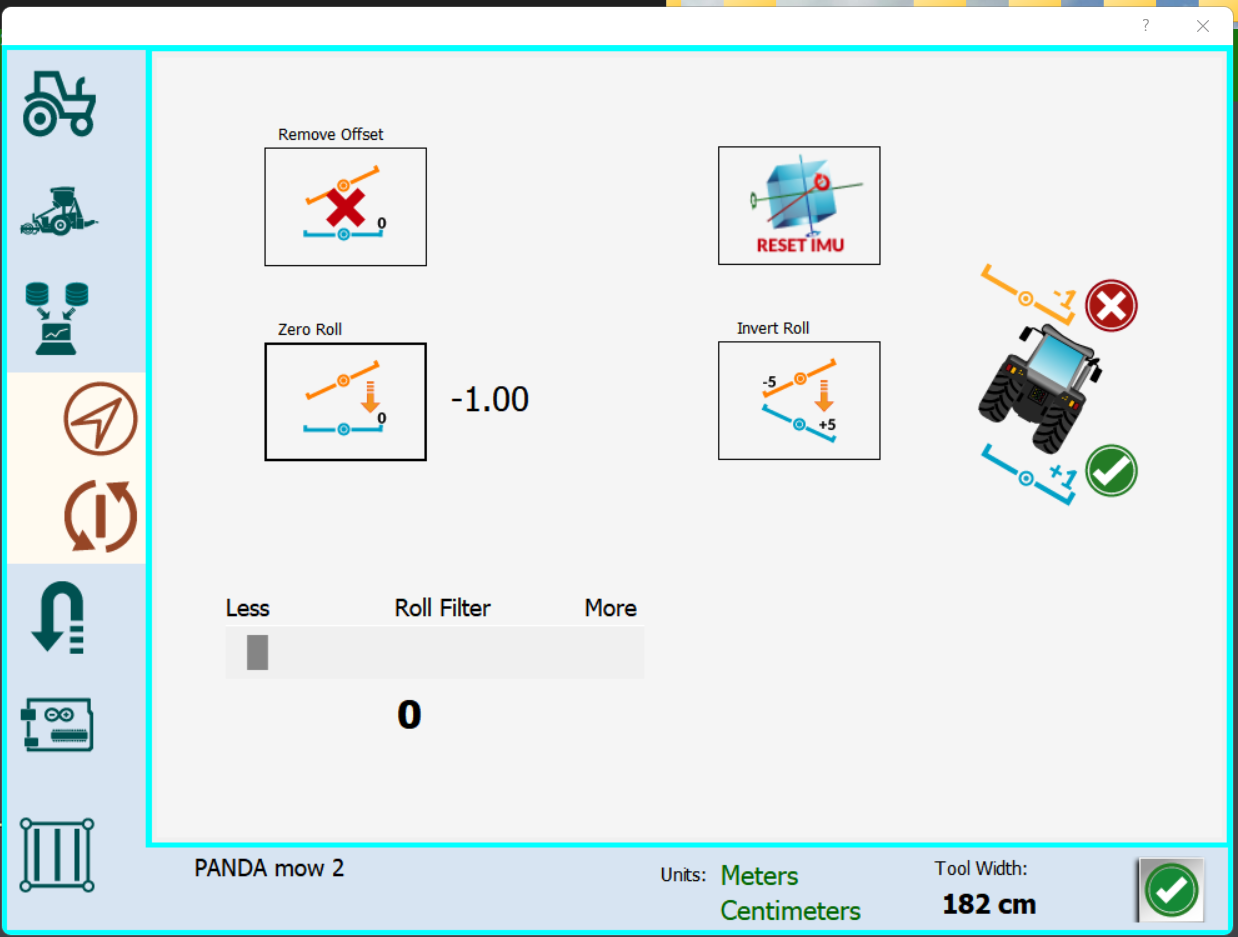
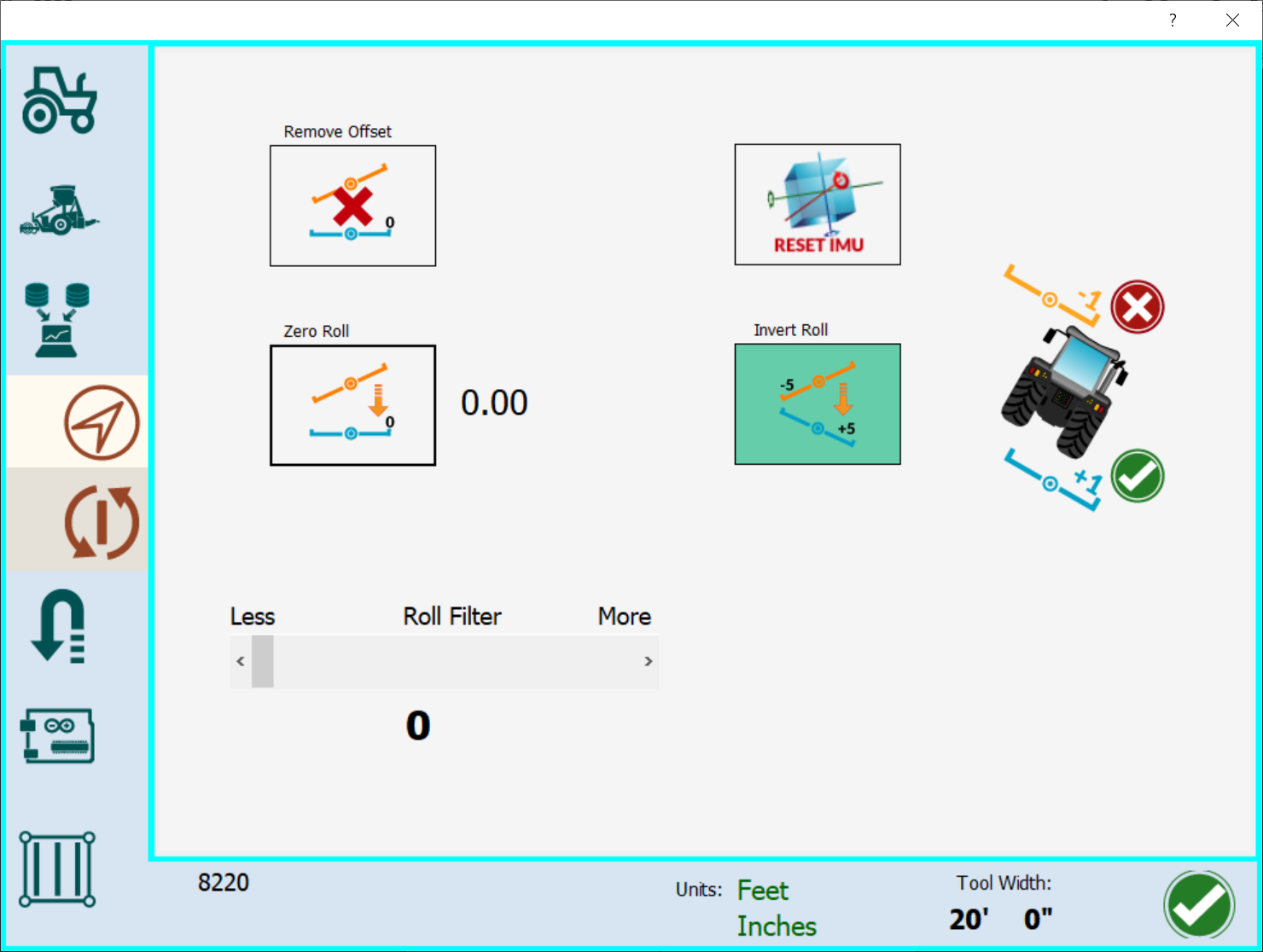
Is Roll filter set to 0
Park on a side hill and confirm roll direction correct, park on flat and zero roll
Is a Red arrow displayed by the tractor, if so drive forward and tap tractor, even if not do this.
Most tractors have a steering angle of 38-44 degrees.
Set angle turning right
Set Ackerman to equal right degrees turning left
After setting those re check zero
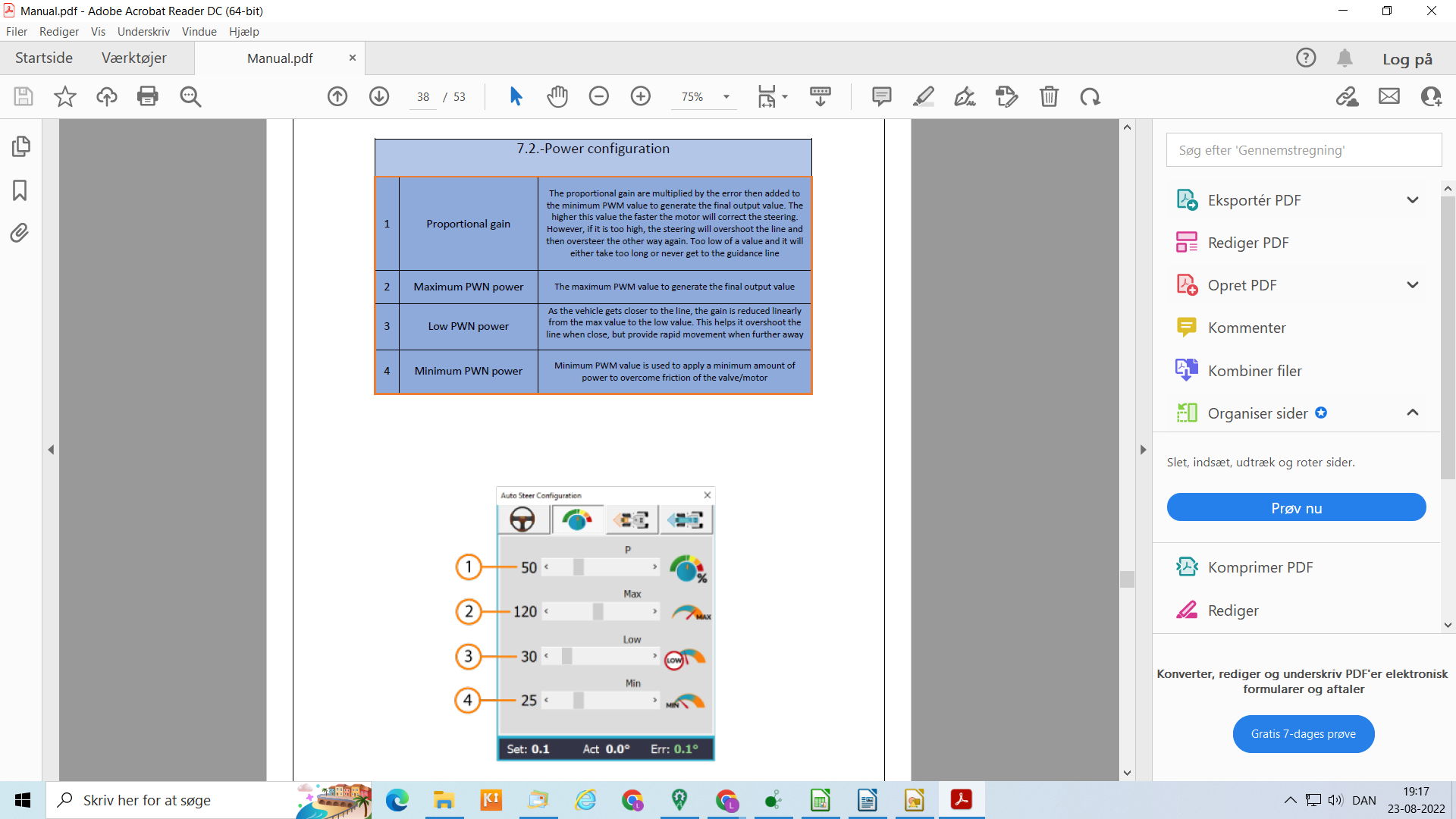
Try motor settings
Gain 62
Max 190
Low 40
Min 30
Try PP settings
Look ahead 2.5 (works on the mower and 4wd)
U turn look ahead 1.4
Deg per deg roll, 0 for now
Integral, 0 for now
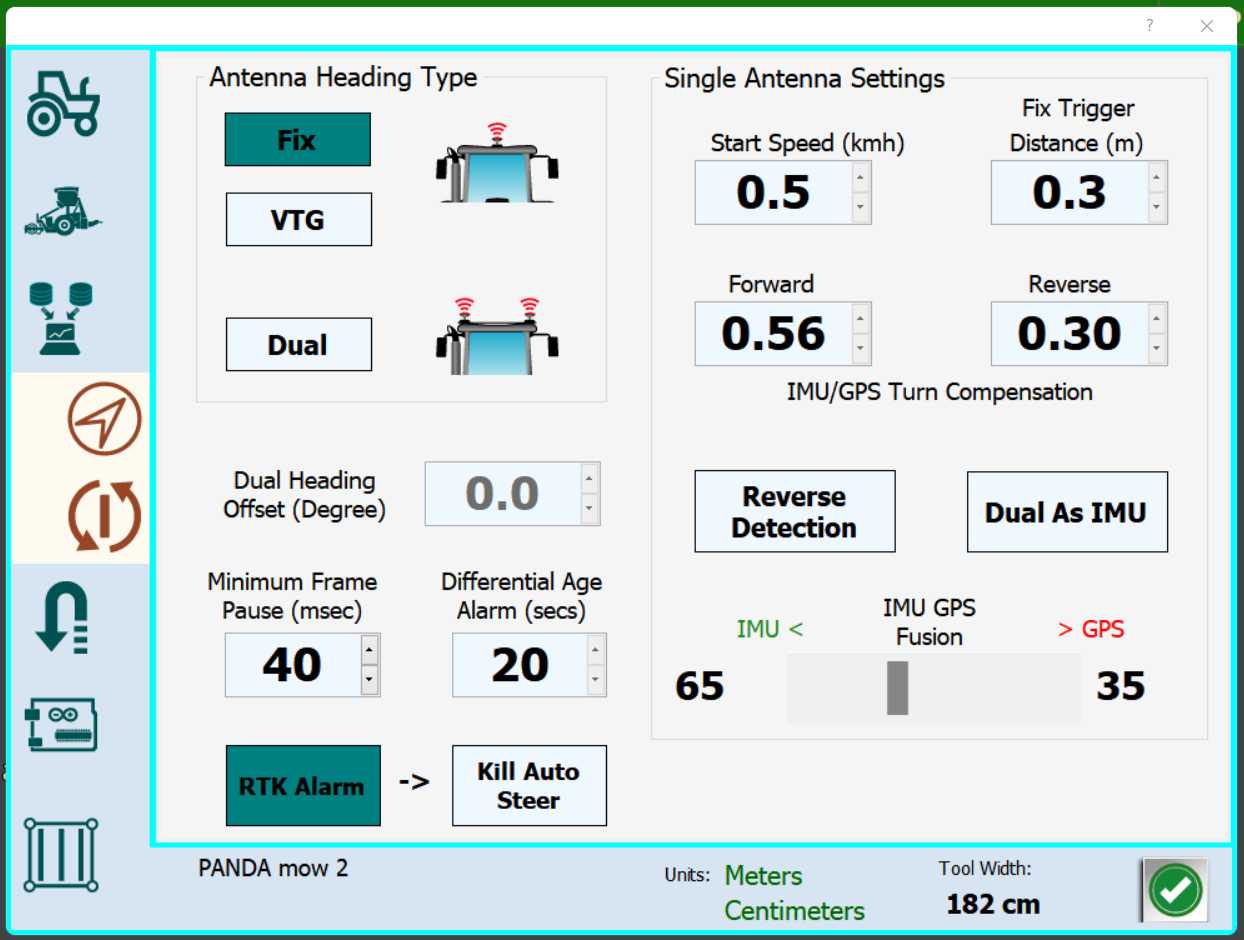
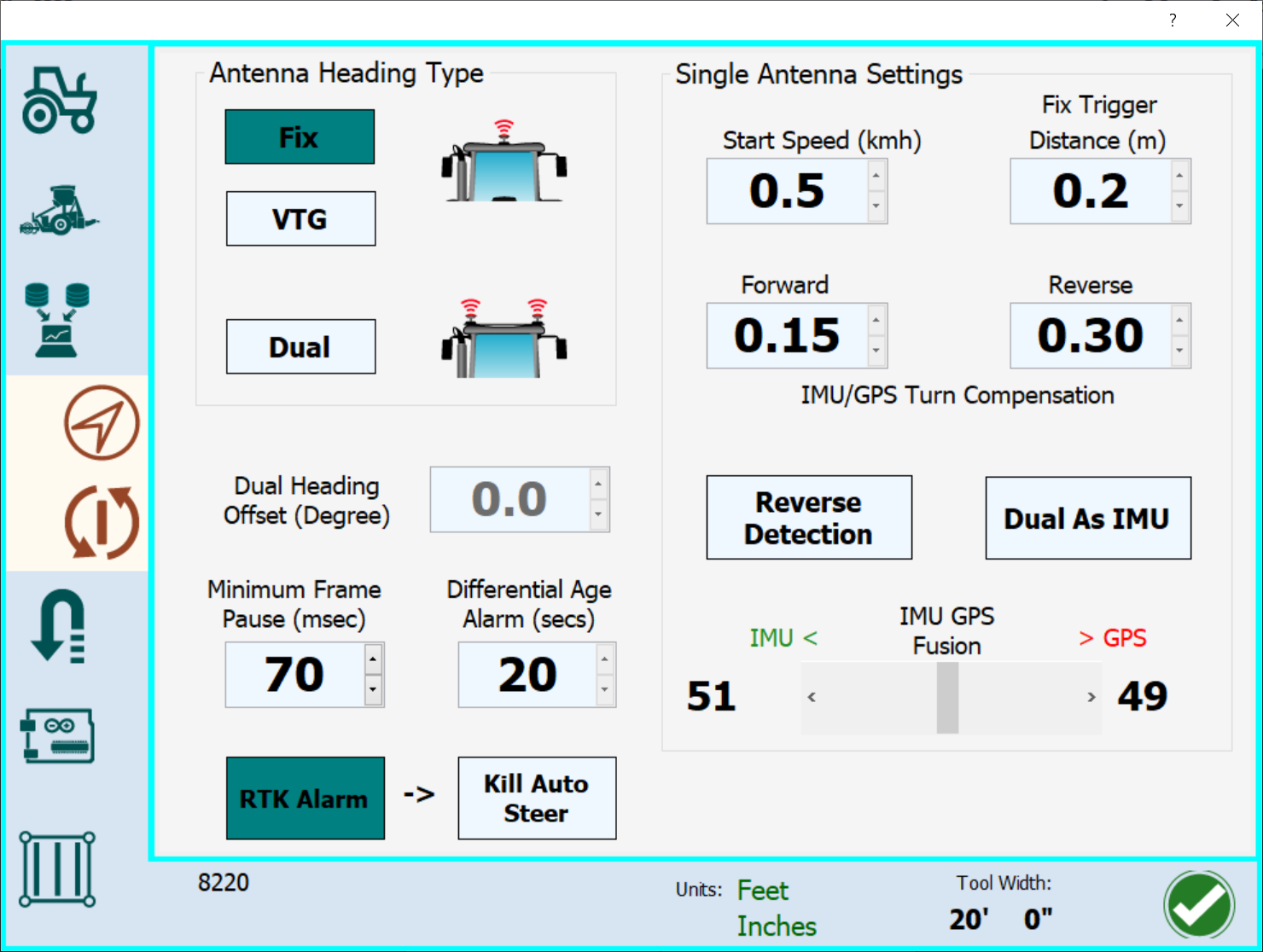
Also open your input page with the fix to fix setting and send a photo.
Thanks for the checklist, I will go thru it all again tonight.
I will also try to get a video.
What is strange is that when I started it would follow a line pretty good. It would not do a turn around correct on a recorded path. I did a check on turn radius using the record function in the steering settings and when I corrected the turn radius in the tractor settings to match half the recorded turn diameter is when the problem started. Then even after changing the turn radius back it won’t stop zig zagging.
Here is a video showing the issues I am having. Let me know what you think. I showed most of the settings in the video. I saw that I forgot to show the settings in the one configuration screen.
P = 63
Max = 190
Low = 40
Min = 30.
I would definitely start picking out a new WAS as suggested by @Larsvest
But until it comes in we can continue to experiment and see if we can band aid the current one.
Make sure you have no excess play, or slippage on the was linkage.
Ok around 3:48 I notice you are always riding one side of the line, and your error is always positive.
Try making sure that the Antenna is truly center of travel.
The one sided error also makes me think that your initial was zero is not the best.
Try the classic method of aiming the tractor from the steering deere to the row marker sight at a close object and making it go dead center toward it without having to correct steer and hit zero.
write the new zero value down
drive on an AB line
slowly adjust the was zero slider one way or the other from this value to see if the error gets better or worse.
This is the exact reason I am playing with a ‘WAStimator’ so that the teensy can dial it in with data with use, not guessing. Averaging multiple values of the was, when it has been at 0 offline error for at least a second, to try and make a more accurate set point.
Here is a copy of my mower on rails settings, they are also extremely close to the 4WD stieger settings.
I agree about the WAS. Not much resolution with that little of travel. Another thing I like to do to check WAS zero is use drive function to see if it goes straight, or curves to one side. Can adjust zero with that. Works pretty well. If angle isn’t repeatable in drive, then you know new WAS will fix it. Love the gear! I may try that sometime.
What I don’t get is why it was steering really well and then all of a sudden this started.
I also don’t understand why it is commanding to move the wheel that much. You can see in the wheel angle graph that it is being commanded to go how far it is going then it commands it to go the other way that far. The WAS lags the command but this will happen unless we increase P for the motor.
Do you need to have roll inverted?
Anyway you must also try to set antenna hight to 0 aka zero m , this way you know for sure roll does not do anything wrong to the steer output.
Yes, Roll invert makes the roll go the correct direction for how I have the IMU positioned.
I can try with the antenna height being 0.
You can see that in the first part of the video that the actual AB line error is very small, usually less than 1", so it is staying on the line. It is just wagging back and forth at the front axle. The actual antenna is not moving much side to side. However after testing a while it makes me feel sick.
Blockquote Oscillation is usually caused by the control system lagging the process and over correcting in one large correction.
This is what I don’t understand. It doesn’t need much correction. The required steer angle should be a really small angle. Less than 1 degree and yet it is commanding a steer angle of more than 1 degree. The WAS is getting to the commanded angle just lagging behind slightly.