AgOpenGps not work without WAS, you need rewrite code for this, but well is Open Source ![]()
![]()
1 Like
Experienced users please develop algorithm a set up and testing Panda.
For example:
- Take a pole, fix the antenna on the top end of the pole, measure 200 cm. and fix the pole at this point on the table (this will be the center of swinging).
- Settings - Antenna Heading Type - VGT.
- pole straight up
- wait for RTK
- zero the roll
- create field
- run the test with swinging pole
- tilt the pole 10 degrees, you should see:
Antenna - 0.14 cm. (cathetus b), if the measured value is greater you need to increase the height of the antenna.
Correction Distance - -0.18 cm.
Correction Easting - -0.04 cm.
etc.
1 Like
Are you doing the work Vili?
When do yo think you’ll have something to show us? Excited!


14 Likes

Wow it scary how close the fix and imu track. Looks very stable.
Teensy Panda is looking great ![]()

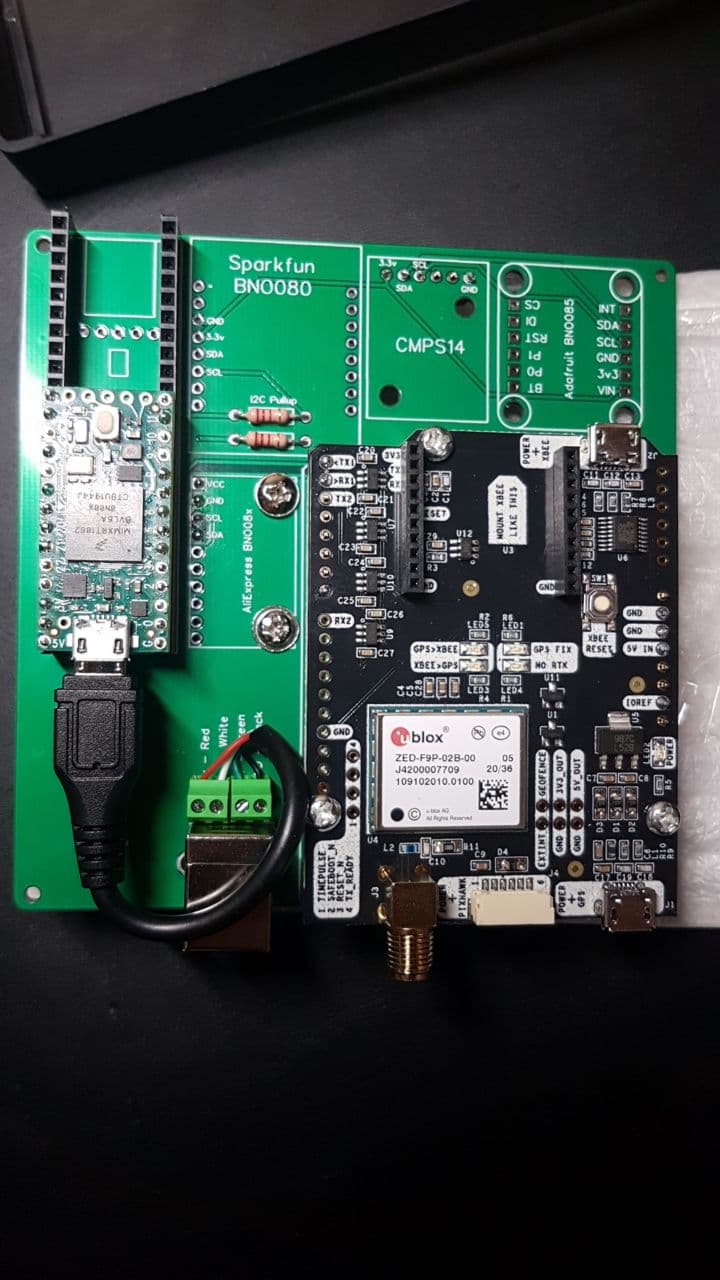
I thought there were two USB cables. One for f9p and one for teensy. Or did you power f9p from teensy?
Amazing Vili!!! Congratulations, it looks great!
What is that teensy ? Can that be used instead of 4.1?
That’s a teensy 4.0
2 Likes
I’ve been hacking on an ESP32 sketch that implements all the same logic as Panda, but also combines the gyro offset calculations from AOG and does the calculations and translations for terrain compensation right on the ESP32, emitting a synthetic GGA and VTG stream. This allows me to use the corrected GPS position for a variety of purposes including other devices and precise logging on my phone. So far the tests are promising on the bench. I’ll be trying it on the tractor soon. Not sure it is of any value with AOG, given that AOG can already do it nicely with the Panda messages. I haven’t bothered with reverse detection for now; at slow speeds the heading comes entirely from the gyro anyway, so it would function correctly for most of the times I back up. Hope to have something to post very soon.
6 Likes
Ok I may be missing something, so does the panda board currently just output CAN, or is it still using V2 as remote IO over UDP?
I think there are still no PANDA/autosteer boards, no UDP-teensy-PANDA code, no PANDA-autosteer code (for UDP, I have made one for USB)
I’m looking for UDP code, I have boards but struggling with coding ![]()
will continue to try in the next days.
1 Like
Looks to me like it’s just simple serial over USB really, just like how GPS was typically done before through AgIO. With a Teensy 4.1, though, it could easily support UDP. Don’t think it has anything to do with CAN.
So its just GPS+IMU+Guidance fused for 0 lag, but the final command goes to V2 via udp to steer.
Clearly from the lines in the field its steering, @Vili is a machine, but those lines are not from a lightbar.
Panda is like game genie

1 Like
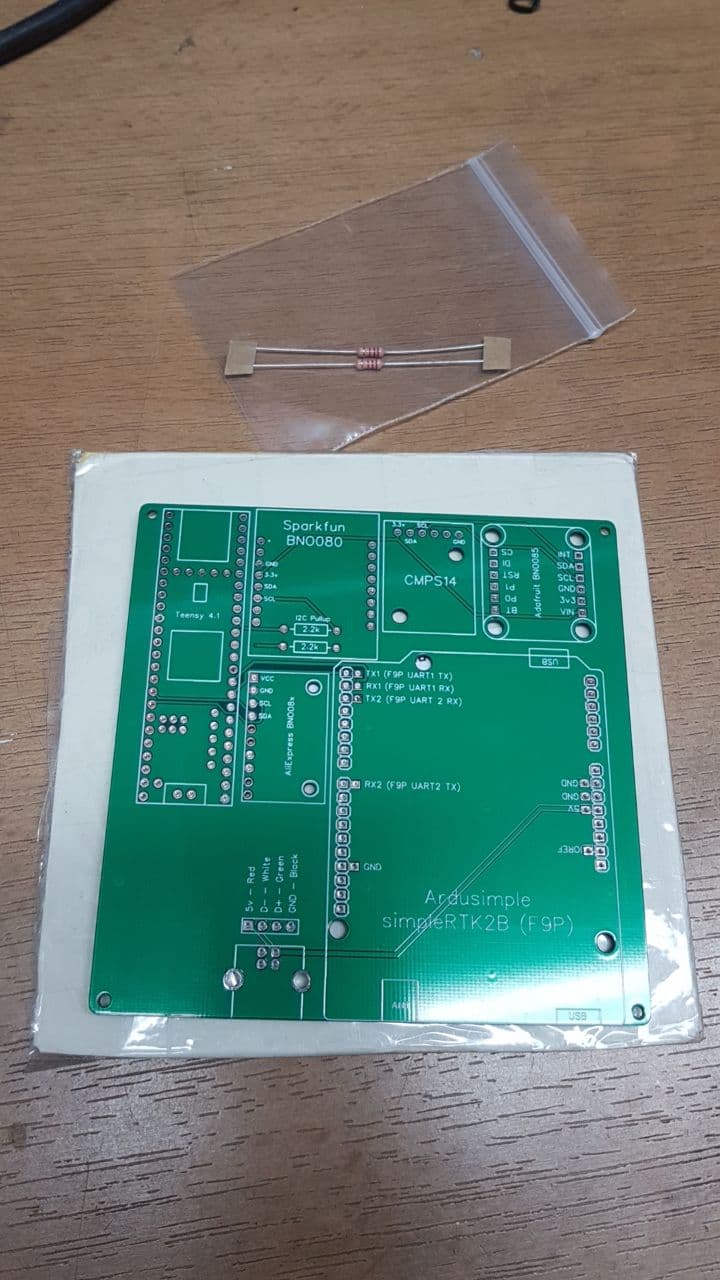
You are using cmps14 and bno08x? Does they have specific orientation? You take 5v and gnd from the teensy and gave power supply to the f9p through the 5v in and gnd which is on the right side of the picture?
Hello! When will the pcb be available?
Yes I did it this way. Power f9p (simplertk2b) from 5V of teensy, and I powered bno by 3.3v of simplertk2b (has higher current draw than teensy). Don’t forget to supply same 3.3v to IOref of simplertk2b