AgOpenGPS
Autosteer Single GPS+IMU+Panda
Hardware
Autosteer
whiterose
30 September 2022 18:46
286
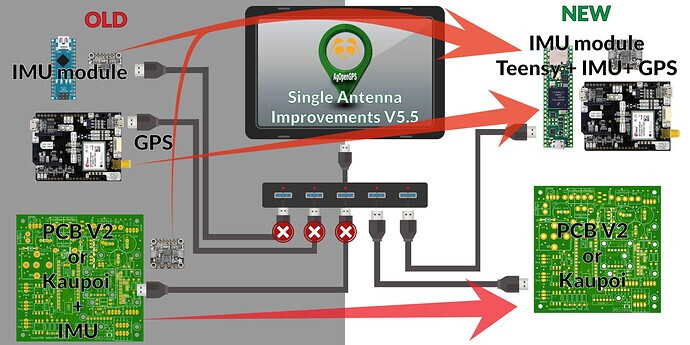
USB model.
From Vili
image
690×345 87.8 KB
Also your other answers are on this page, in posts 6 and 7.
1 Like
show post in topic