I read in a section that Tony’s files were working but I don’t know where I read it, yes it works for me too.
1 Like
Ok.
So how to do such an upreade? Which software version is best to switch to? Configuration files for F9P will change? Do I have to change the program in Nano? What do I need apart from Teensey 4.1 and a USB-> LAN adapter?
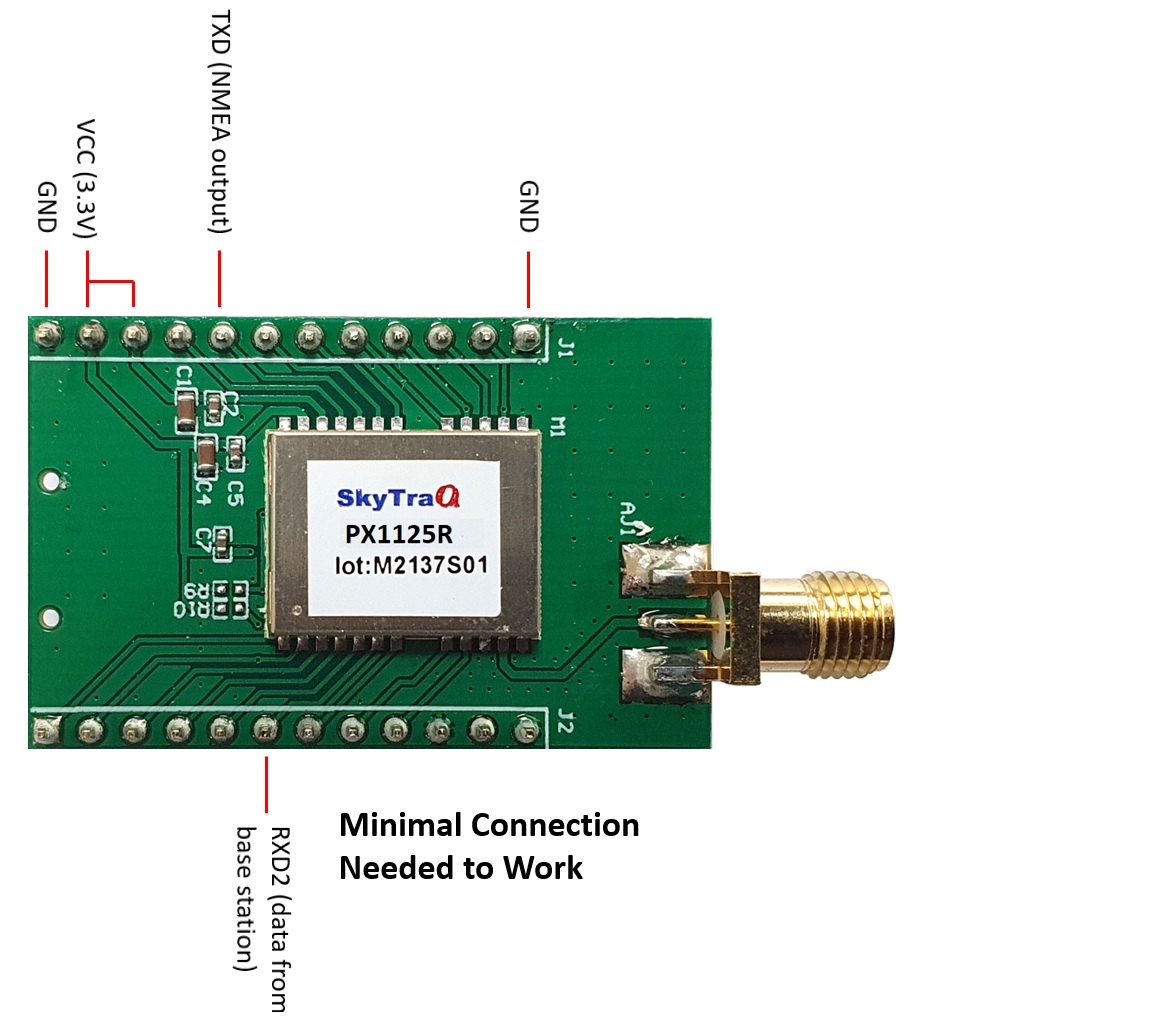
I have this project with the NavSpark PX1125R RTK receiver and with LORAWAN. I will use as BASE a board with the ESPRTK system. I wonder if this is correct.
3 Likes
For Panda and rtk do the RTCM messages pass through the teensy or do I need to hook up the second USB port on the F9P? I can’t seem to get an RTK fix since moving to panda setup.
Rien branché sur f9p
sorry dont understand
Pas d’usb branché sur f9p
1 Like
ok so for rtk to work do I need the f9p connected directly on one port and the teensy (which is talking to f9p over serial) connected to another port?
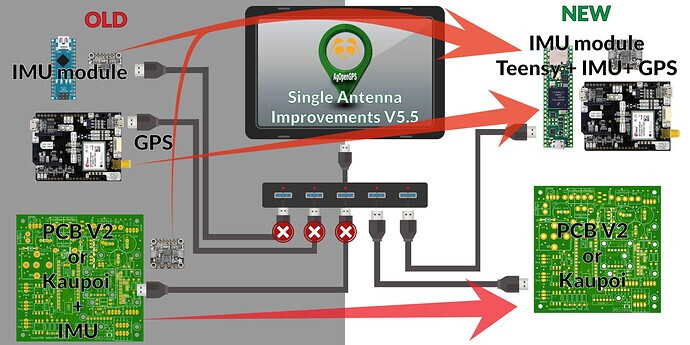
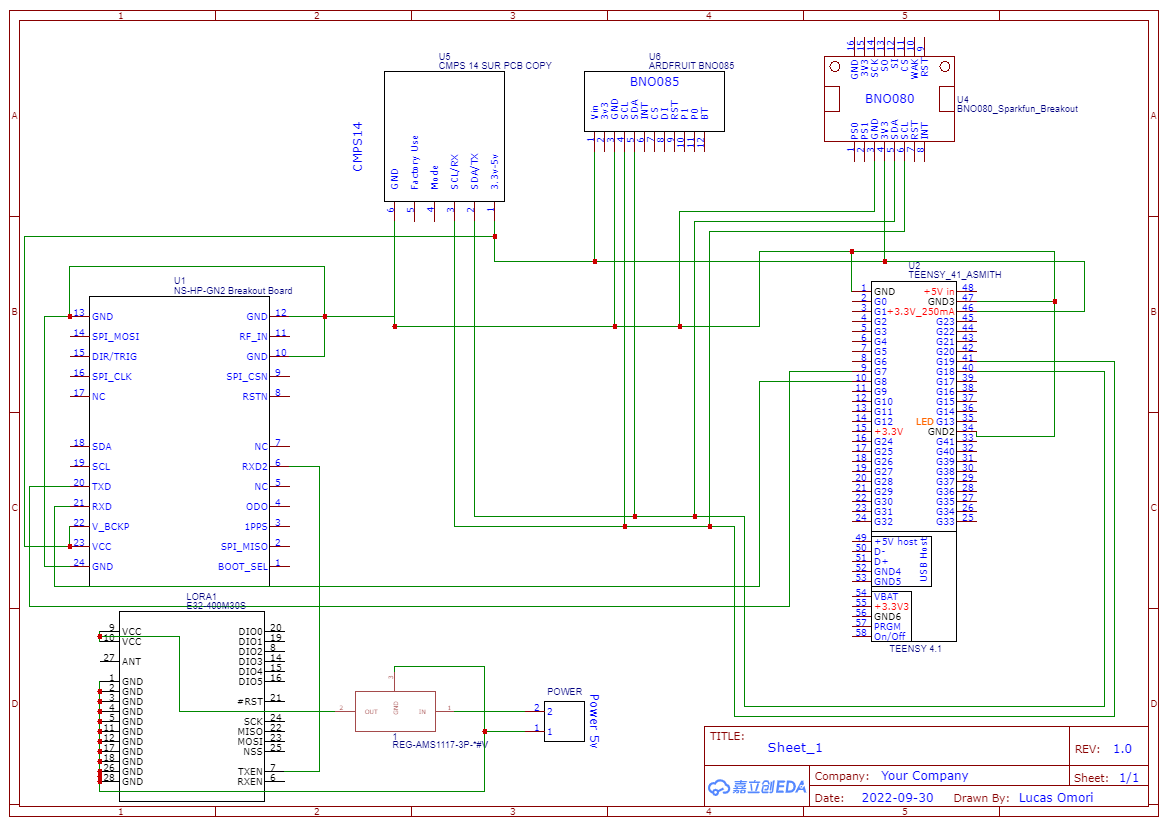
this is the diagram
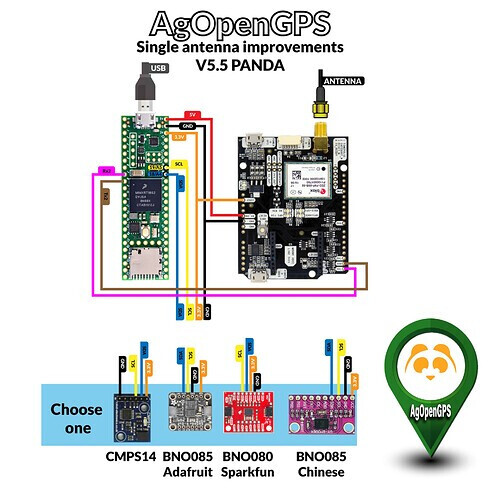
Just 1 USB to teensy
so teensy should pass the rtk packet from ntrip through to F9P?
Are you using NTRIP Client on AOG or getting corrections sent directly to the f9p? Via radio for example ? Either way it should pass I believe.
ntrip on aog
ill need to check maybe i havent configured f9p to recieve rtcm on both ports
Im using Pre Panda config on AOG version 5.5 so I am not sure if the f9p config for PANDA changes things with RTCM.
How much will panda improve things? I currently have a single antenna with IMU. With the antenna on the roof it would wiggle badly on rough ground I have it on the nose of the bonnet now and it is working quite well but will still wiggle slightly when I hit a bump. Would changing to panda setup be the answer?
Panda has greatly improved performance on bumpy ground, I also find it better in very soft ground.
The improvement is very noticeable, you can see it on the ground and feel it in the seat.
1 Like
Ok I’ll have to give it a go. So do I just need a teensy and connect it up according to the diagram? What do I need to do software wise? Thanks
The panda .ino is included in the 5.6.2 files.
You can build the above diagram, and use your v2 board. But no bno on the v2.
Or if you are all udp, I have an alternate version of the teensy .ino
But if it was a new first time build would just make the Panda board.
By “new” do you mean the all in one is released already? I haven’t seen mention on the forum here…
1 Like