AgOpenGPS
Autosteer Single GPS+IMU+Panda
Hardware
Autosteer
Vili
16 April 2022 22:03
44
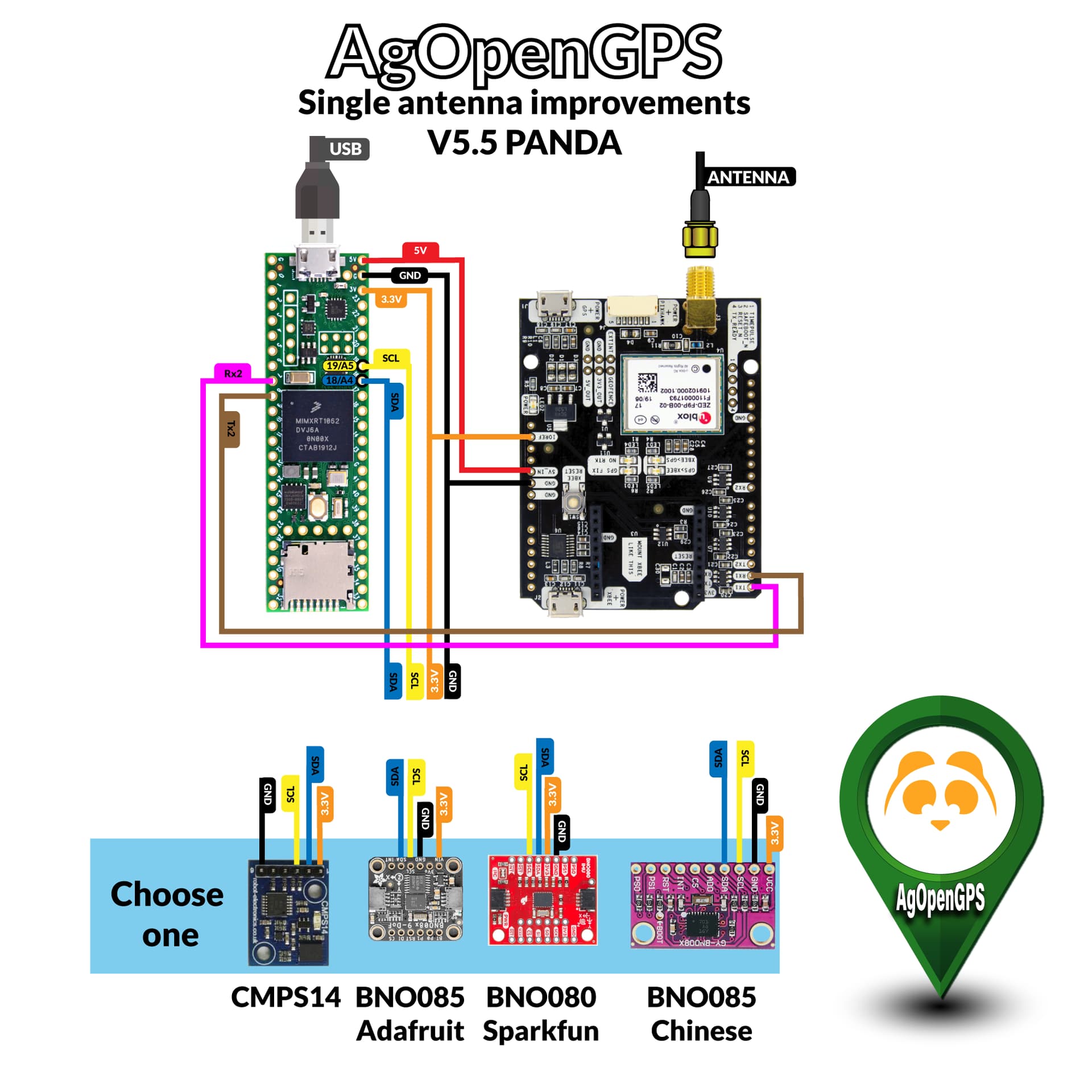
PANDA
1920×1920 240 KB
Ino on Brian Github
4 Likes
Panda - GGA over UDP
show post in topic