I think just use 5.5 for now it looks like 5.6 is under some major reorganization and may not be finished.
tab “zHandlers” is now “NMEA”, there now is a brand new “IMU” tab. I think you found a major bug/ tag mismatch, in some newly written code that is still under construction.
I use the first version of panda, so teensy connected to f9p with wires and usb connected to teensy and tablet.
The roll is freezing now and then, about every 20 minutes. Switch off the teensy 4.1 (and connected bno) cures the problem.
I read your post about setting serial speeds… I know how to set the f9p speeds, but how to set the teensy 4.1? I hope maybe this is the problem…
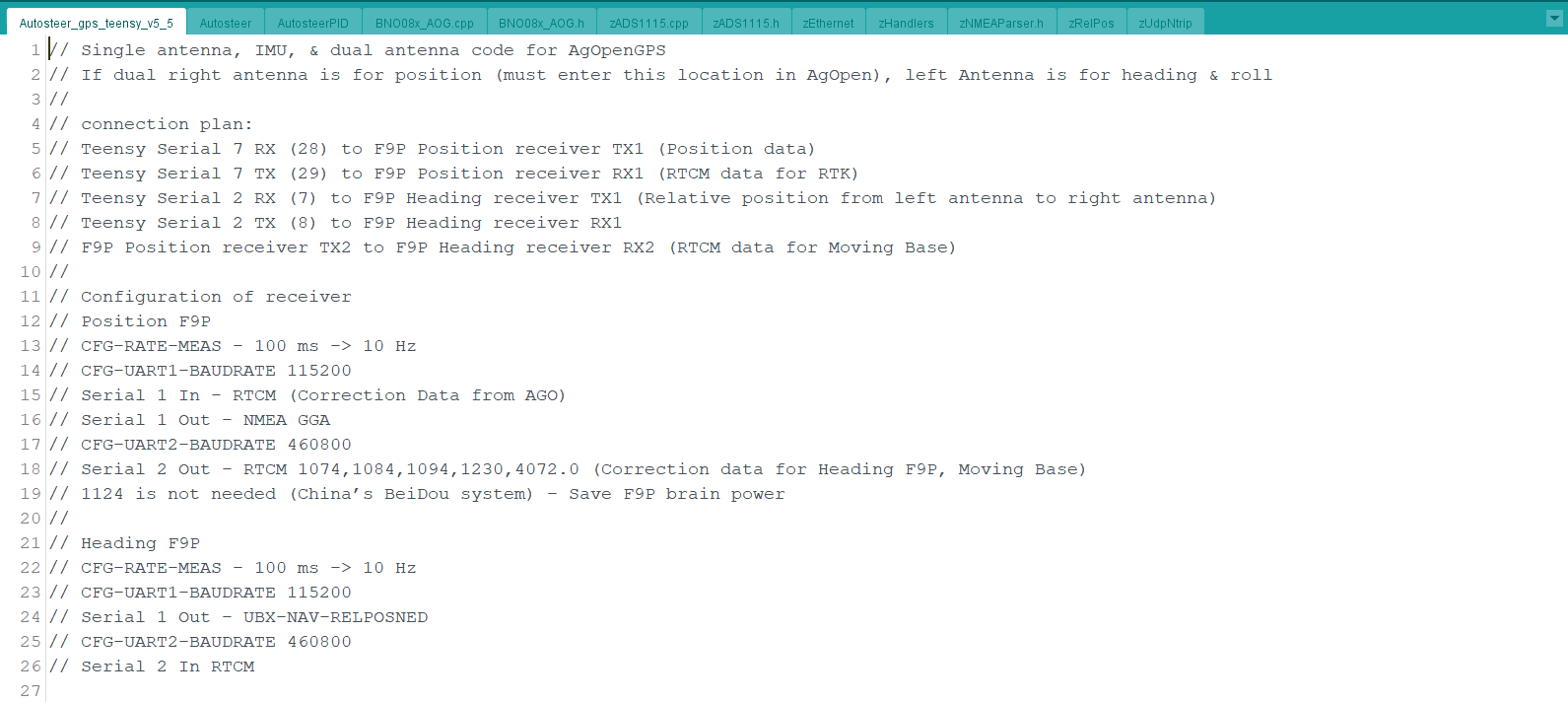
The uart serial speeds for the GGA message are described in the beginning of the .ino, but if you are , making the panda sentence at 10hz you have the F9P set correctly. PANDA is all about timing and needs to run at 10hz.
The BNO is connected to the I2C bus, and is set up to automatically connect. Double check for poor connections, or a place it may be accidentally grounding out.
I have a problem with the speed which is shown in the right upper corner of AGO, since I have changed the system to panda. The problem is that it shows me the x1,5 speed which I am driving. The steering and everything else works, but I do not understand it because before it was ok.
The speed at the GPS Data in AgIO is always 0.
Is this a problem for the system itself or is this only a display option for the operator?
My system:
Kaupoi Mod PCB
F9P with the configuration from Andreas
Panda with Teensy 4.1 and CMPS14
Version 5.6.2
UDP
Is this standard at panda, or is there a setting that I forgotten?
I am working at setting up a Panda board. I am using Version 5.6.2. For some reason I can never get my board to show up in AgIO. My computer is set to 192.168.1.101. Gateway is 192.168.1.1. Through Windows CMD, I can ping the module Teensy at 192.168.1. 120, so I know it is connected to my network, but AgIO can not find it.
Maybe I am using the wrong code . I was unsure about the support files. There is a Basic Panda GPS folder that contains “Autosteer_gps_teensy_v5_5.INO”. There is also a Panda2 that contains “A_Teensy_v56.INO”
I assumed the “A_Teensy_v56” was correct for version 5.6.2. Is that the right one?
Depending on IMU if it doesnt use magnetometer then you can put box anywhere in cab, if IMU uses magnetometer you have to mount box away from interference.
Tried to setup panda today f9p teensy 4 and cmps. Got panda message position was good roll seemed to work but speed was always zero and couldn’t get direction correct? Is speed contained in panda message ?
i had the same problem. I downloaded version 5.6.2 and this is where panda works normally. In versions 5.6.14,5.6.14,5.6.11 it doesn’t show me the speed.