As-tu des liens sur quelques vidéos ou forum sur le sujet (bn008x ou CMPS14) qu’il pourrez m’aider
je regarde au pire je fais une petite video
merci
1 Like
paul
ma video est ridicule
mais en conclusion ce BNO s’installe en long a plat connecteur sur le coté droit
j’ai soude des fils pour limiter les erreurs
petite video mais qui aide à comprendre , .Il y a sur la carte 3 contacts steer switch, implement switch et tun sensor , comment peut-on les utiliser ?
Les 3 contacts servent a des actions dans le logiciel
Le steer permet de détecter l’engagement ou la validation du volant ( c’était obligatoire sur la V4 mais pas forcement nécessaire pour la V5)
Par exemple quand j’engage mon moteur avec le levier, il y a un capteur qui capte la position et qui démarre le moteur ( il est configuré en switch mode)
Le work sert a colorier la parcelle
Le remote permet de désengager l’autoguidage dans des conditions choisis( en lien avec avec le steer qui est en button mode)
Les 3 entrées fonctionnent à l’identique tu as un+12V un signal et une masse
Il suffit de faire un pont entre la masse et le signal pour les activer
( évite le 12V si tu peux ou de souder la source R8)
ou brancher un capteur type NPN si tu veux valoriser le 12 v
Bonjour à toute l’équipe, j’ai donc fabriqué mis en œuvre et essayé l’agopengps sur un micro tracteur yanmar avec les conseils et les recherches dans ce forum.
Pour moi le plus gros travail ça était de mettre en place le capteur d’angle ainsi la rotation du volant à l’aide du moteur, mais dans l’ensemble essai très concluant.
J’ai vu sur internet qu’il existe pour faciliter le fonctionnement et le montage , des volants électriques à déclanchement auto avec capteur d’angle incorporé.
Avez vous des infos , quel est votre avis
Bonne journée
De quel volant s agit il ? Avez vous un lien ?

je ne ferai aucun commentaire sur la 1er image mais ces system n’ont pas se capteur d’angle intégré au volant fonctionne juste avec une imu.
Pour aog fait une recherche sur ACS712 et regarde ceci https://discourse.agopengps.com/uploads/default/original/2X/7/756158ba56968d5f49fcbb127a6bca21ee4165e1.png
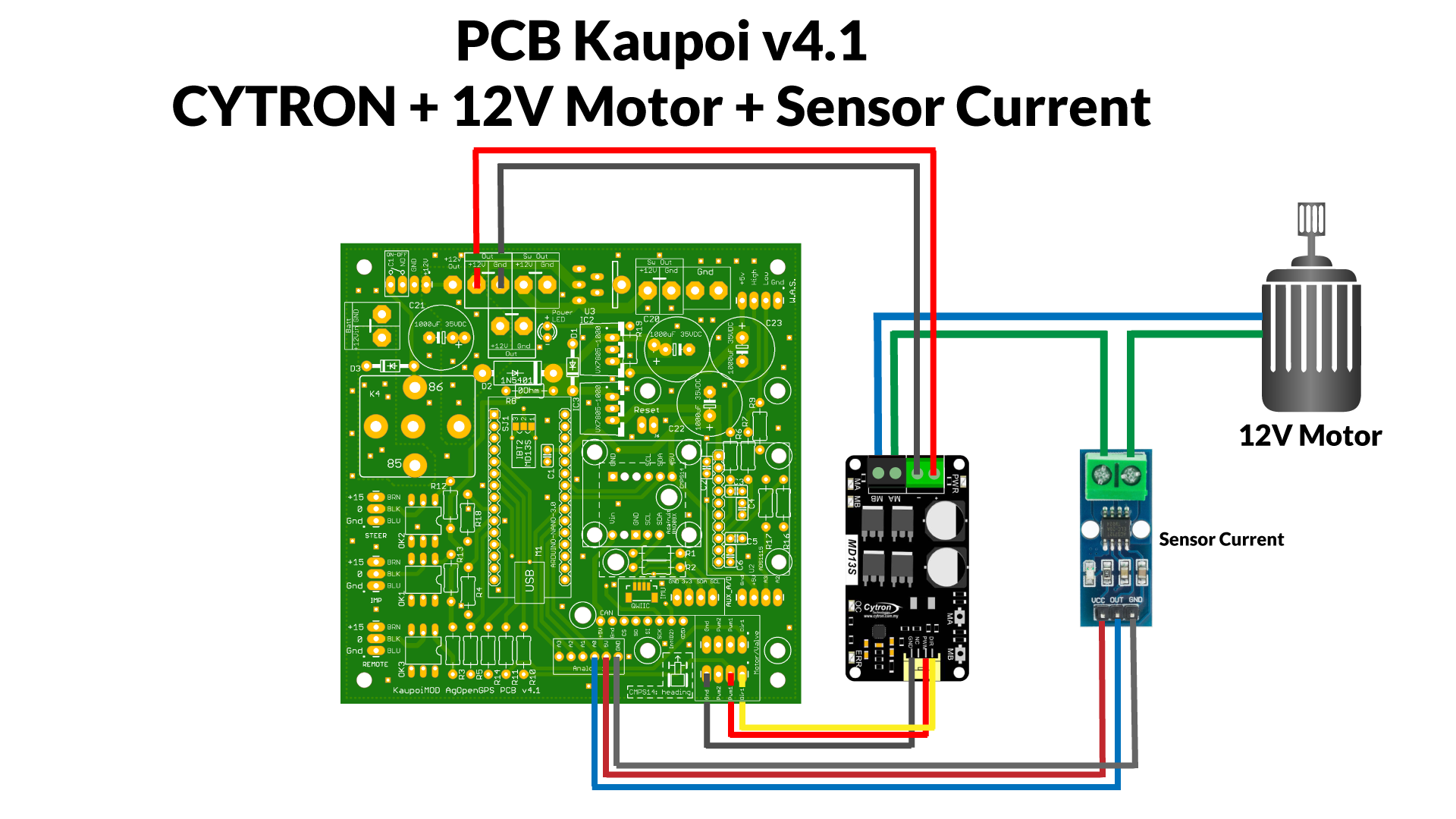{kind=link}
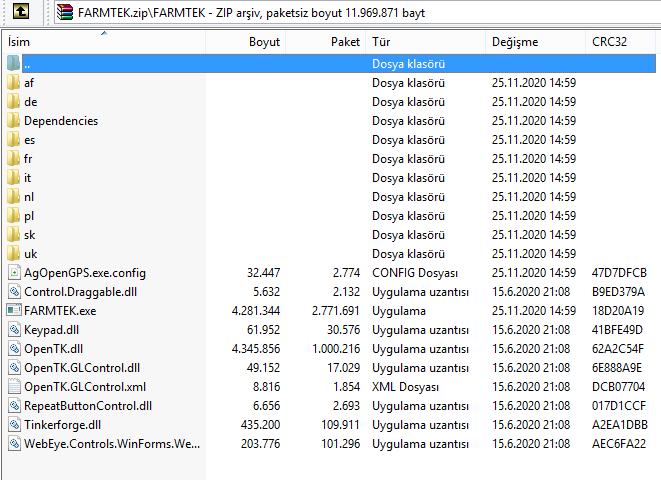
As far as I know, Farmtek is a man who sells the AGopengps program as his own program and does not inform anyone about the steering system he has built, hides his information, but earns money thanks to AGopengps. Although it changes the name of the program to farmtek, AGOpengps finds a way and creates the config file with its own name. Poetic justice.
Autant que je sache, Farmtek est un homme qui vend le programme AGopengps comme son propre programme et n’informe personne du système de direction qu’il a construit, cache ses informations, mais gagne de l’argent grâce à AGopengps. Bien qu’il change le nom du programme en farmtek, AGOpengps trouve un moyen et crée le fichier de configuration avec son propre nom. Justice poétique.
2 Likes
Bonjour, je viens de réaliser le montage sur un deutz agotron 110 ,les premiers essais on était difficile , j’avais le gps instable mais après recherches il s’agissait de la fiche d’antenne défectueuse. J’ai du mal a attraper la ligne de guidage lors d’une reprise après demi tour et à stabiliser le tracteur sur cette ligne , j’ai remarqué quand mode simulation avec le même réglage j’ai le même problème, par contre si je rapproche l’antenne de l’essieu AR le problème s’atténue L’antenne est placé sur la masse à l’avant du tracteur à 3,22m de l’axe de l’essieu AR et à 1,4m de hauteur.
Quand pensez-vous, avez-vous un retour ?
si tu peux partager des photos
est tu en PP mode
je suis en pp , je vais pour le photos mais j’ai eu d’autre témoignage pour ce problème (chez moi impossible de régler en indiquant la vraie distance antenne essieu arrière et depuis que j’ai réduit la distance dans aog sans bouger la position de l’antenne qui est au bout du capot en réalité ça fonctionne beaucoup C’est normal puisque ce que l’on cherche en Pure Poursuit c’est de positionner l’essieu arrière sur la ligne. Mais si tu réduis la distance sans bouger l’antenne, tu seras bien positionné à l’écran mais pas dans la réalité.)
t’es sur de parler de PP c’ets pas plutot Stanley ?
pp se base sur un point virtuel bien devant toi et essaye d’aligner le tracteur a ce point d’ou les valeur de look ahead et de coef multiplicateur
en tout etat de cause le mode PP coupe les virages si on exagere…
Oui, ça me semble logique. En PP on essaye d’aligner le pont arrière du tracteur sur la ligne. Si ton antenne est proche du pont arrière, notamment en simulation ça zig zag moins… D’où l’importance de régler les valeurs Look ahead et speed gain pour avoir un point virtuel devant et anticiper les mouvements.
De toute façon, il faut indiquer les mesures exactes des positions d’antennes et dimensions du tracteur, puis affiner les réglages sinon tu pourras avoir un beau tracé à l’écran et des erreurs sur le terrain
bonjour, beaucoup de tracteurs sont maintenant pré équipés rtk , pensez-vous que l’on pourrait utiliser agopengps pour gérer autoguidage?
prequiper rtk?
plutot prequiper autoguidage…
dans ce cas oui il faut etudier ce qui est possible de valoriser