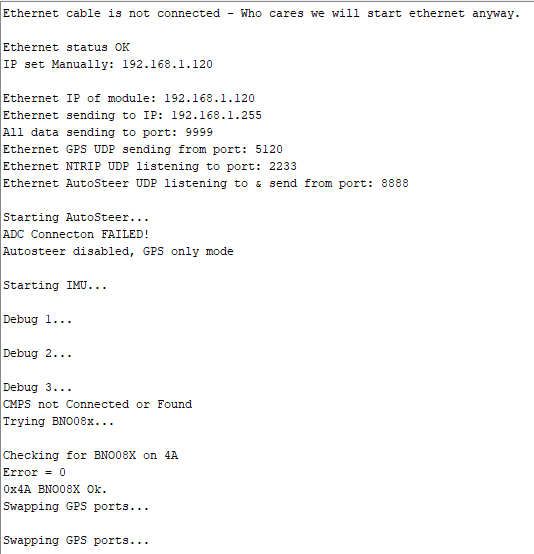
Hi, I am trying to get started with a basic Panda setup, but I am not able to get the Teensy to recognize the F9P. Any suggestions to what I am doing wrong or how to proceed? When using the Arduino IDE serial monitor it keeps giving the message “Swapping GPS ports…”.
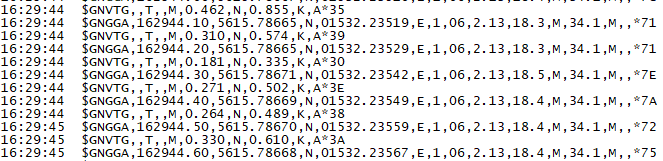
Serial Print:
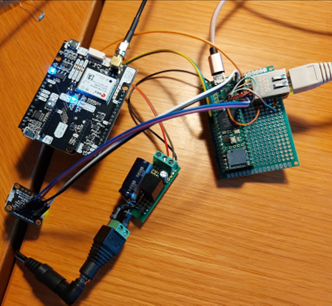
Setup:
AOG 5.6.2 connected via ethernet to Teensy 4.1 with Autosteer_gps_teensy_v5_5
Ardusimple F9P with SW version 1.13 with Aotners config file.
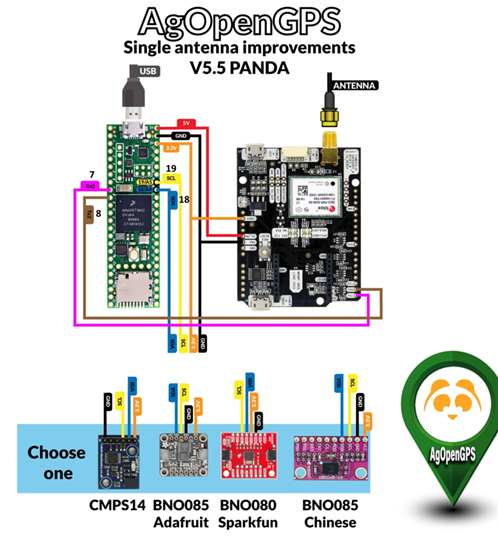
F9P and BNO085 connected as below:
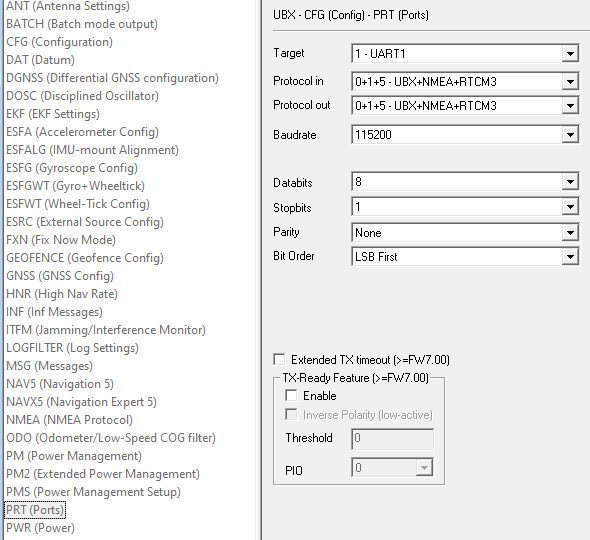
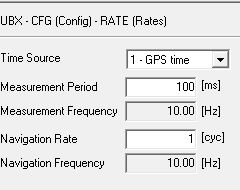
To have the F9P talking to the teensy you must have his Uart1 outputting NMEA at the same bautrate than the teensy.
It should be 115000 but some versions since a week or two use 480000.
Follow this tread:
I recommend you to play in Ucenter with the F9P configurations, you will have full understanding how it works.
If you don’t want,you can install all from the V5.6.33 prerelease
The teensy would be loaded with “Autosteer_gps_teensy_v5_5” from TeensyModules/Firmware
The F9P would be updated to 1.32 with the .bin then loaded with 1.32 “SingleAntennaRover.txt” in Ublox F9P Configurations
@Pat thanks for the replay. I have checked my configuration but I do not find any problem… I will try the V5.6.33 prerelease and se if I have better luck with that.
@wland@Pat Thank you for the support! I finally got it working. It was a very similar problem as in the other topic. I have tried so many different setups but it was having them correct all at the same time that was the issue. I now use PotatoFarmers config file for the F9P but with the baudrate of 460800 on both the teensy and the F9P and the connection scheme as shown in my first post.
460800 is only beteween F9P and Teensy. For Teensy to AOG software on computer is ethernet. For the programing and debug interface beteen tennsy and the computer i used serial at 9600.
Hi, I trying to build PANDA basic GPS receiver with esp32 (BT based)
I port PANDA related part of Teensy code and its working OK.
I have one question - is it just in my case or is it in yours too - IMU and fix heading are most of the time different. Do you think it makes sense for me to just one time sync it with the VTG heading? let’s say like this :
if(bno_reset==false)
{
if(vtgHeadingOK=='T' && VTG_heading < 1 && rtkfix)
{
bno08x.softReset();
delay(300);
// Use gameRotationVector and set REPORT_INTERVAL
bno08x.enableGameRotationVector(REPORT_INTERVAL);
bno_reset=true;
}
}
AOG itself will sync the IMU heading with the actual fix heading. Once AOG figures out the offset it will blend the adjusted IMU heading with the VTG or fix-to-fix heading and use that. So the PANDA IMU heading value is raw (un-adjusted).
How does the VTG heading data get to AOG? The current firmware code parses the VTG heading data into a variable, vtgHeading. Afterwards, the code does not appear to make use of vtgHeading anywhere else. Perhaps VTG heading was used by AOG at one time but the current firmware code does not seem to use it.
Yes, Panda worked for a while via bluetooth. But then I adapted the teensy code for esp32, and for now it works seperately gps and autosteer (two physical devices with esp32, but same code, connected with wifi on tablet hotspot). I can’t find time to make it all in one device to see how it works (gps+autosteer). I use ibt2 driver, i dont have Cytron…