Here is a quick write-up on using bluetooth corrections with an All In One micro pcb.
My requirements:
- Use a bluetooth xbee to send corrections to a single micro f9p from Lefebure android app.
- Lefebure NTRIP app needs gga from the bluetooth xbee.
Steps to achieve this;
-
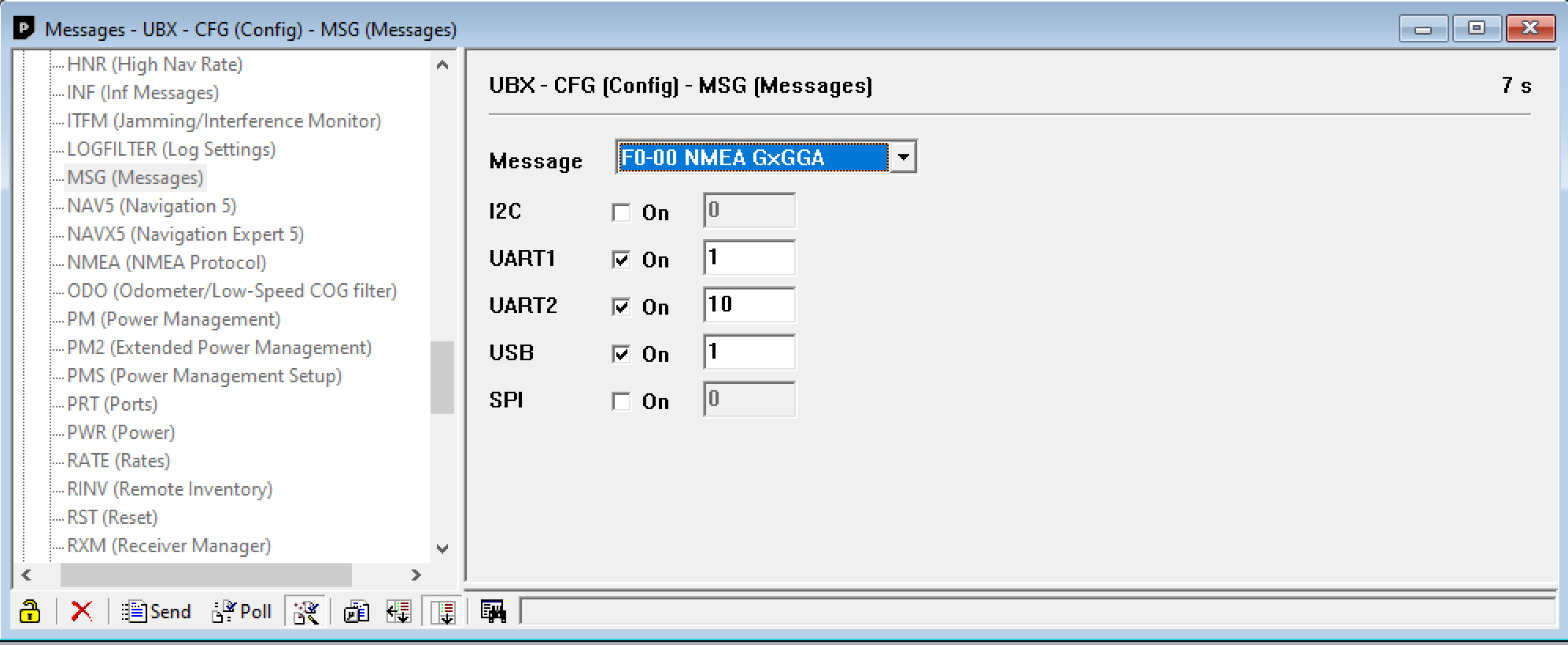
Send NMEA out on UART2
-
Change UART2 Baudrate to 38400 to allow communication with xbee
- Enable GGA messages on UART2 (DON’T FORGET TO SAVE THIS CONFIGURATION!)
- Now we have a problem, because there is no way to send the GGA message from UART2 to the xbee. I’m sure there is a better solution, but here is what works for me.
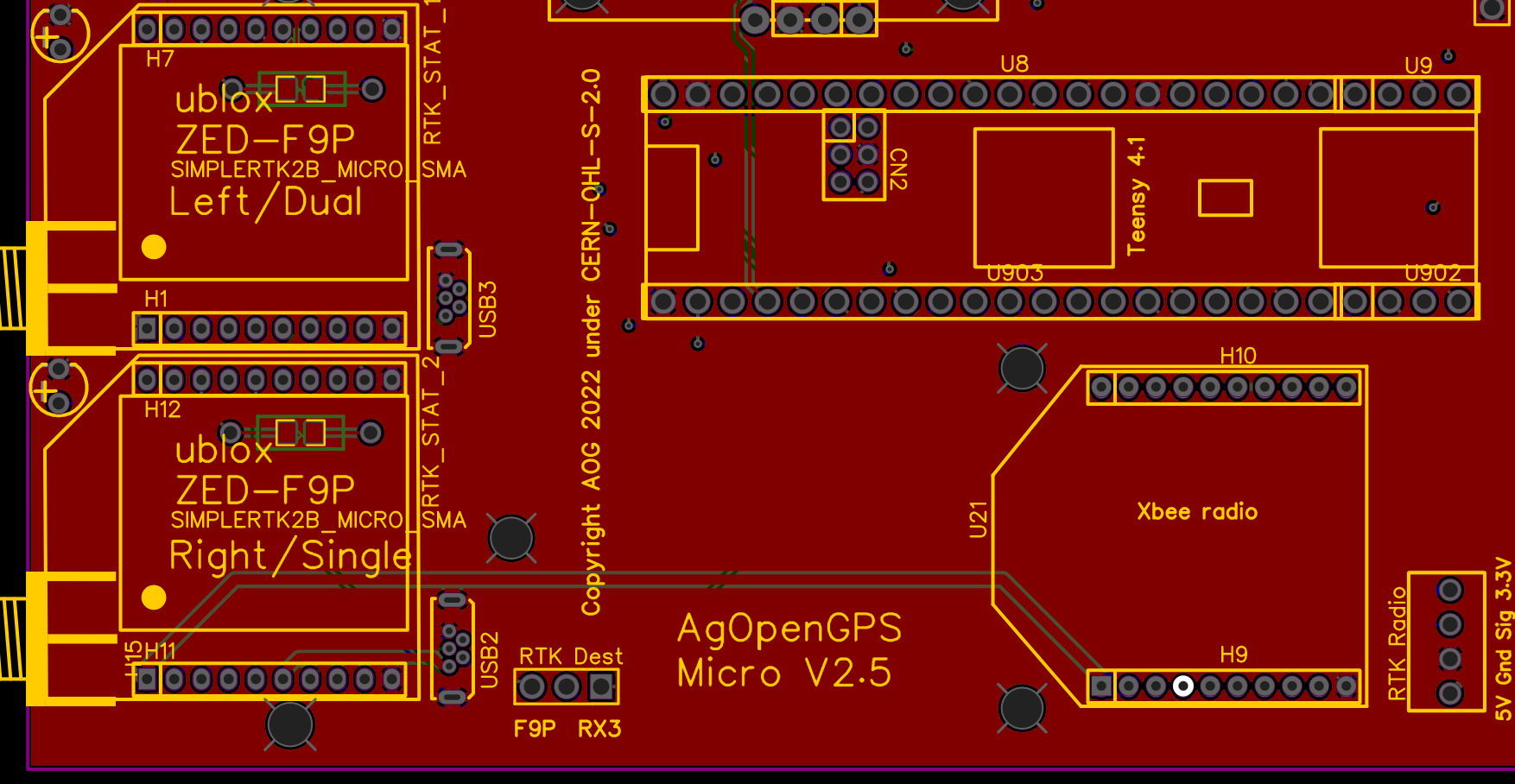
Solder a wire from one of these highlighted pins…
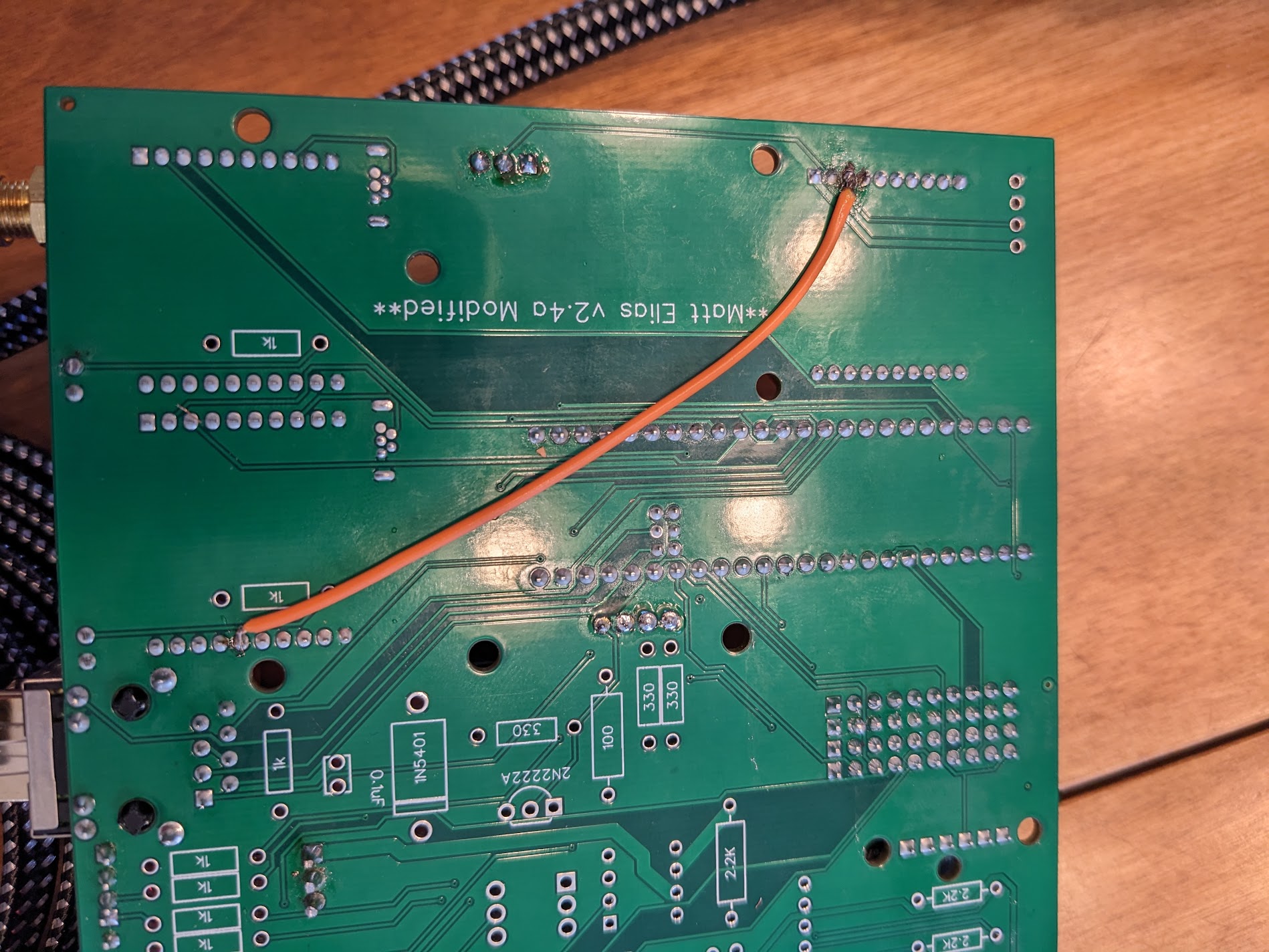
to this pin.
This is how I did it.
RTK!!!
3 Likes
I am planning to do exact as above, or is there another way to get rtk to single (right) F9P on the AIO Micro 4.2 PCB from bluetooth module plugged into the radio socket?
You should be able to just
- Plug the bluetooth module into the xbee slot
- Plug the F9P into the right slot and set the jumper to the F9P position OR plug the F9P into either slot and set the jumper to the RX3 position. I recommend the RX3 position to send the data through the Teensy.
- Use the normal F9P configuration files from the hardware repo
- Maybe setup the bluetooth module for the correct baud rate?
The extra soldered wire and F9P config are if you want to sent NMEA out from the F9P to the base station. Most base stations do not require you to tell the base station the rover’s position.
For base stations that do require the rover’s position to be sent, I’m still not convinced you need the wire. I haven’t done this myself so take this with a grain of salt, but you can set the jumper to the RX3 position to pass the communication through the Teensy. Then you should be able to configure AgIO to either send out the real position, or a spoof lat/lon position. You can also set a GGA interval in AgIO.
I believe the wire is needed for the serial TX back to the Xbee socket
the Lefebure app, that provides the rtk correction, needs the gga message to work. That is the reason I need to send from f9p to the bluetooth module…
1 Like
I understand now, I didn’t realize it was a requirement of the app. I also forgot about the requirement of a connection to the radio’s rx connection. A wire is definitely needed to use the app then.
You can use the internal Android location if you want to.
by “use android gps” lefebure works without the extra “gga” wire?
Yes it should. I’m not sure how it would affect your battery life.
The manual Lat-Lon should not affect battery life at all. Just enter in a position near where you actually are (like your farm’s home base).
I will defenitely try this! I don’t know why I didn’t see this option in the first place …
What is the benefit of sending RTK (rtcm) data through teensy? And how does the F9P get the rtk input (I see it goes into RX3 of teensy) but I cannot see it flow back to the F9P? Or does the aog software or teensy do the rtk calculation?
Today I tested by rtk direct to F9p and aog worked ok with rtk fix, but on aio 4.2 pcb gps led stays red
Another question is, I always have to invert the BNO in aog to show correct roll, but it is mounted in the correct orrientation. Is that normal?
If mounted properly it doesn’t need inverting, can you show your orientation?
If you need to invert your roll then turn the PCB around 180 degree (point connector the other way).
People who use ntrip in AgIO use the Teensy to forward the rtcm from AgIO to the F9P. If you use a radio or ntrip/xbee device then you can send the rtcm direct to the f9p if your baud rates match. Most radios have their serial output baud rate slower then the f9p uart2 so you can use the Teensy to buffer (baud match/convert)
I can invert roll or turn the pcb around, but I don’t understand why roll is displayed wrong while my setup is mounted correct. I have the aio 4.2 std pcb with amp connector pointing towards rear end of tractor.
In this way the X axis of bno is pointing towards front of tractor which should be right. But in this orientation I have to invert roll …