I’m starting new and building my AOG from scratch and would like to see how everyone is doing their boundaries before I start the season.
I’ve played around with driving to record a boundary but when I look at it on Google Earth it seems offset, even with a RTK fix.
Question is, which one is accurate?
You’ll want to record them in AOG. I do it with a receiver on my ATV, so I can get them more accurate.
Your gps is more accurate
1 Like
First make sure you got good base station that has fixed cords and fixed mounted, ideal PPP surveyed in.
Making them in AOG is simplest way, but you can import kml file made by other means.
Google Earth and other maps are not accurate, boundary recorded by AOG will not display good on maps. As well as boundary made in google earth pro imported into AOG. Depends heavily on location, but it should be avoided.
For good repeatability make them in AOG with that base station, and always use that base. As changing base station can result in AB lines / boundary moving. (If needed more bases can be used, but you must use rtk from existing base to find cords of new base)
AOG with RTK most accurate, Google Earth will be quite a way out.
Map all your field boundaries make sure your using an RTK that’s been correctly surveyed in.
I mount the ATV antenna offset to one side above the front right or left wheel and drive with that wheel on the boundary.
You might have your base poorly surveyed and Google Earth might be more accurate but even there it is your base that makes your tractor drive accurately on your field that you mapped using your base!
The base is a CORS system about 10 miles away, so besides my distance from the base I would assume it’s accurate.
The ATV solution is exactly what i had in mind, especially with it set up so I can drive with one wheel on the edge. What are the proper vehicle settings when recording a boundary like this?
I think I set my ant offset to center but you need a very narrow implement because it records the boundary on the “left” or “right” side. It might be just as well to mount the antenna however is most convenient and enter the vehicle dimensions exactly how they are. Use your ATV wheel base width as your implement width. Then record the boundary on the appropriate side.
I also setup my AB lines on the boundary edge but now AOG does that automatically so no need for the ATV’s ant to be offset.
And I also set the “Boundary Record Offset” value to 0, so the recorded points are exactly where the antenna is. I occasionally had heading issues before I did that.
I did a 48 hour record on my base and then did a PPP through NRCAN. Just for peace of mind I repeated the process and the coordinates were within a few mm.
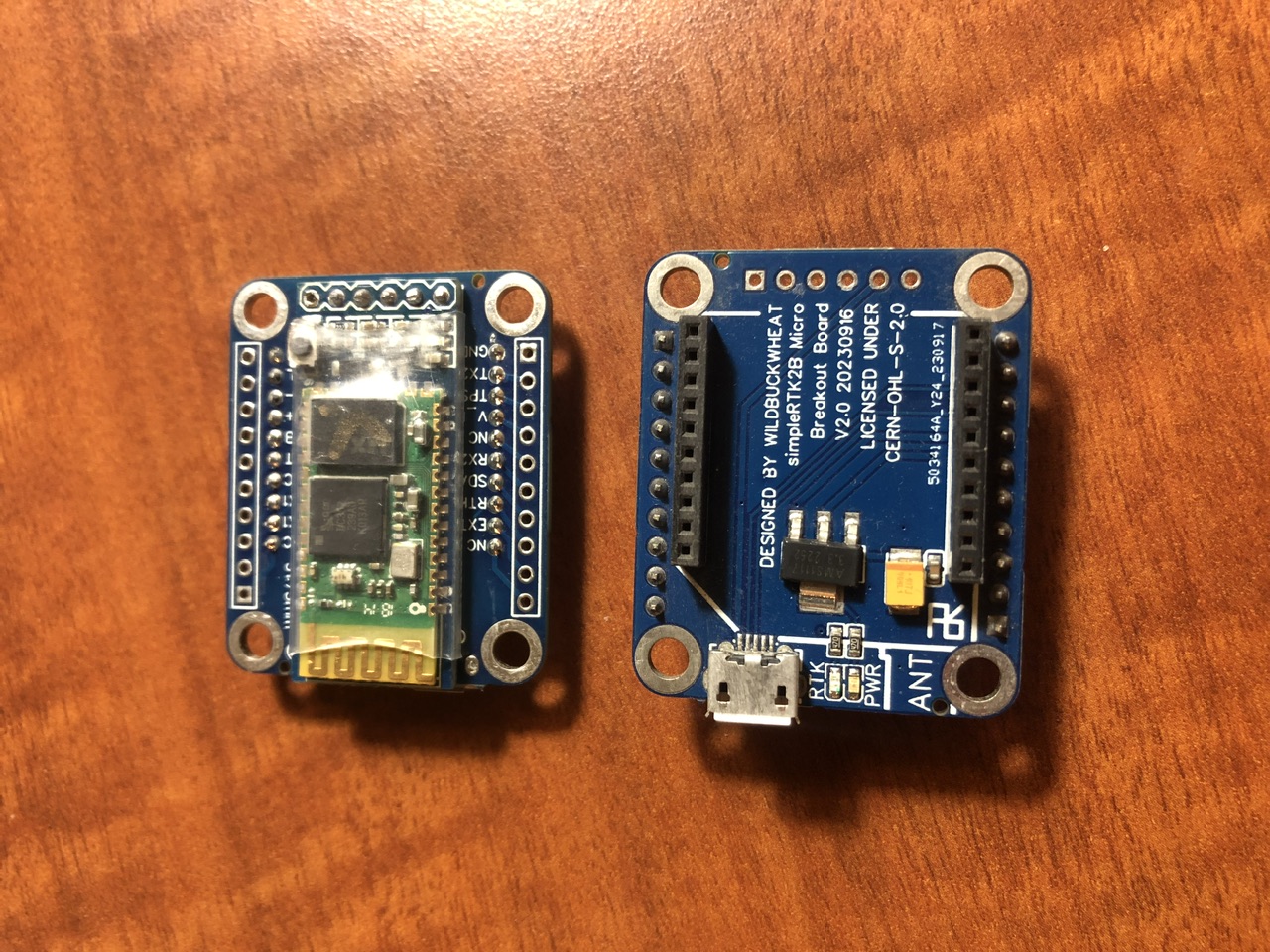
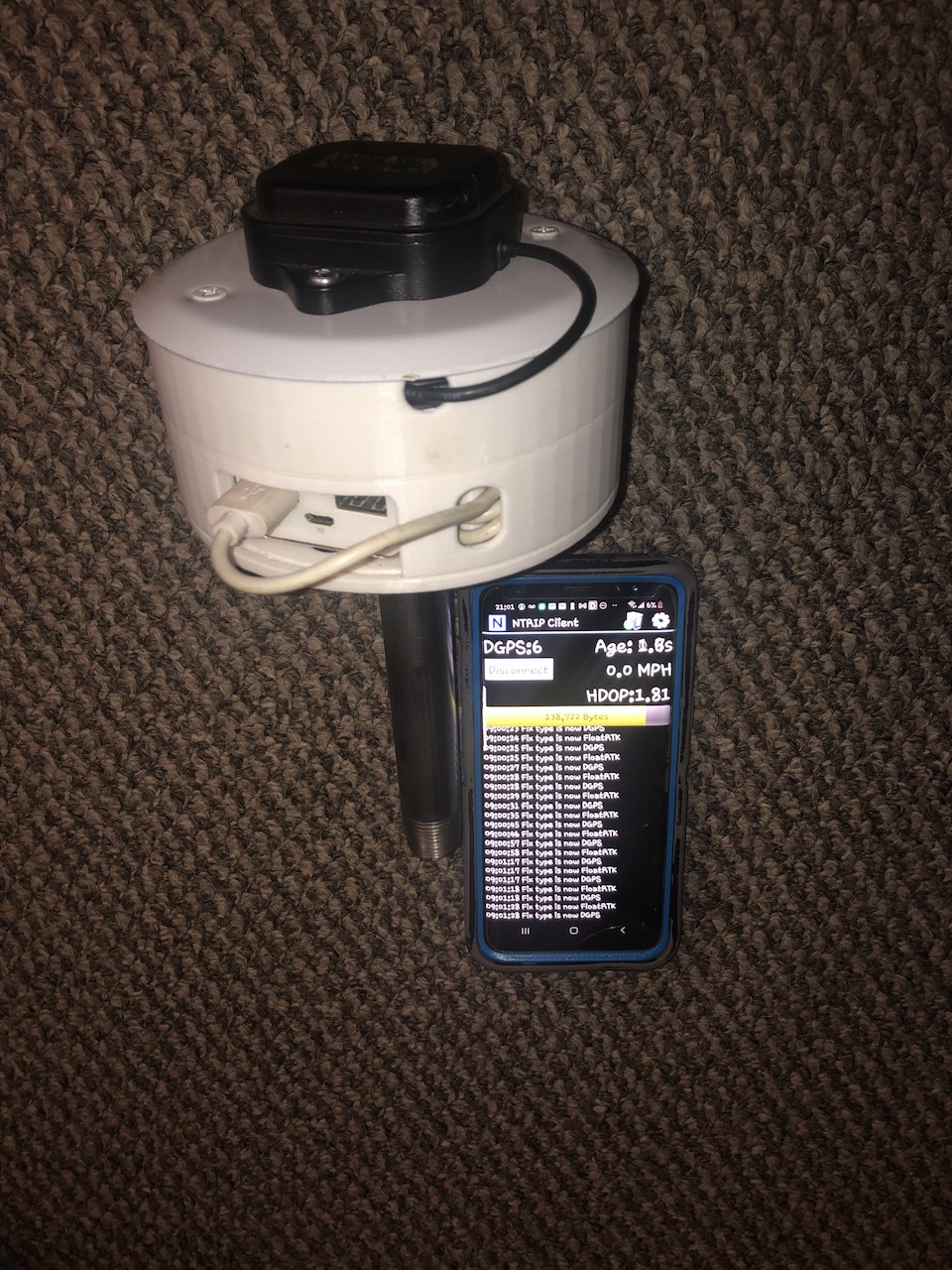
Then I built this portable micro F9P with USB battery bank and Bluetooth connection. I can Bluetooth connect to an AOG tablet or to an android phone with mapping apps.
The portable F9P uses a 1/2” pipe connection. A flange on my ATV rack makes it easy to mount/dismount. I can take it off and hold it over top of fence posts, rocks, hand-walk small interior boundaries, etc.
I set an offset so that the wheels are the boundary. I don’t always love that because driving so close to the boundary can cause signal loss (trees) and brush can scratch the ATV and driving on the edge of tillage can make for a rough ride. I’ve thought about hanging a pole off the side a couple feet, maybe with a small chain dragging from it, but haven’t tried that. I have a helical antenna (haven’t tried it yet) that might be better too.
I try to make the boundaries in the summer after wheat harvest. That’s when I can get in and mow field edges and take out fence posts and trees and just generally tidy up edges.
3 Likes
I’ll add to this, if running PPP for your base station, definitely run it multiple times to confirm. I only did it once last spring and imagine my surprise when everything was offset by about a foot, no idea how that happened…must have typo’d something somewhere because the antenna hasn’t moved.
So far this is all off of a CORS base station, so as of now I’d assume the base corrections are spot on other than my distance to the base.
@WildBuckwheat couple things:
- Are you using AOG or some other 3rd party app to map your boundaries? Besides AOG I’ve been messing with SWMaps (android, built in NTRIP), and QGIS (windows)
- Can you share your hardware/config for doing Bluetooth to the F9P? I currently just use a serial connection.
- Age old question, does powering up/running a F9P without an antenna connected do any harm or is that a thing of the past?
If my RTK boundaries/points are more accurate than Google Earth, is there some other method I can use to cross reference to an aerial background map? I’ve been reading into this quite a bit and it gets pretty in depth so if someone has struggled upon a solution it may save me further headache. 
Regarding bullet point no. 2 @WildBuckwheat has made a seperate thread here about his design.
The description he shared on GitHub is also very good, SimpleRTK2B-Micro-breakout-board.
1 Like
- I use AOG because its familiar, saves the step of exporting/importing, and you can use it to create lines. I have an old Android phone just to use with this, and I have played around with SWMaps and QGIS, either works to export/import boundaries. GNSS Master is another great one (lets you send the GNSS receiver data to RTK2GO for a base station).
- GitHub - WildBuckwheat/SimpleRTK2B-Micro-breakout-board: A small break out board for the ArduSimple SimpleRTK2B Micro For the F9P I use the single Rover config from the main boards repo, but I change the baud rate to 115200 because that’s the max windows will accept.
- I try to avoid powering up F9P without an antenna connected. I’ve done it lots of times and haven’t harmed one yet. I’m not sure what the ublox manual says. My lab bench is grounded to prevent static buildup.
I’m not sure how to shift an aerial map to match the boundary. You can try the Bing maps in AOG and hope they are referenced differently?
1 Like
All good info!
Does AOG use whatever position quality it’s getting for mapping or it there a way to specify ‘RTK Fix’ only like SWMaps? I would imagine I’ll drop to RTK Float by some boundaries with trees…
I used to get some jumping around last year, but I’m not positive SBAS was actually disabled. What’s everyone’s experience when RTK Fix drops to RTK Float briefly or intermittently due to obstructions? I have a fair bit of trees to deal with on my borders and wouldn’t mind mowing my grass with RTK but have quite a few trees. 
Not sure if it’s supposed to jump around or simply slowly reduce accuracy in relation to the time elapsed from the last good RTK Fix.
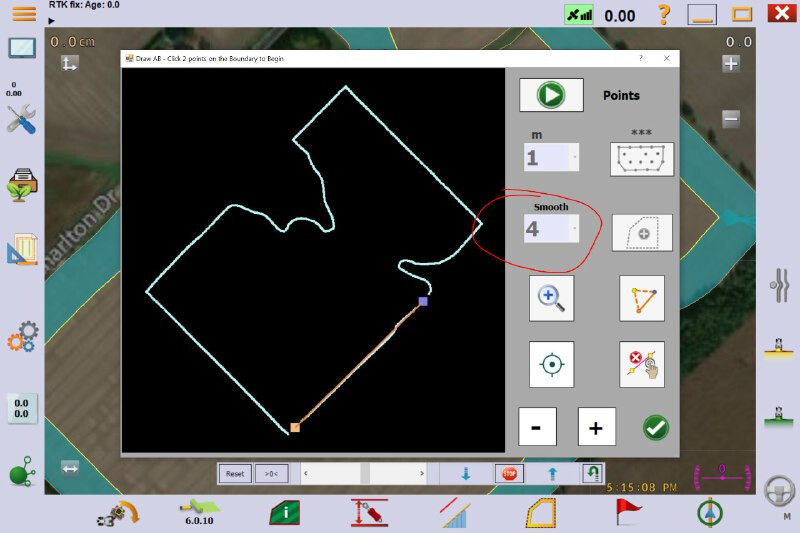
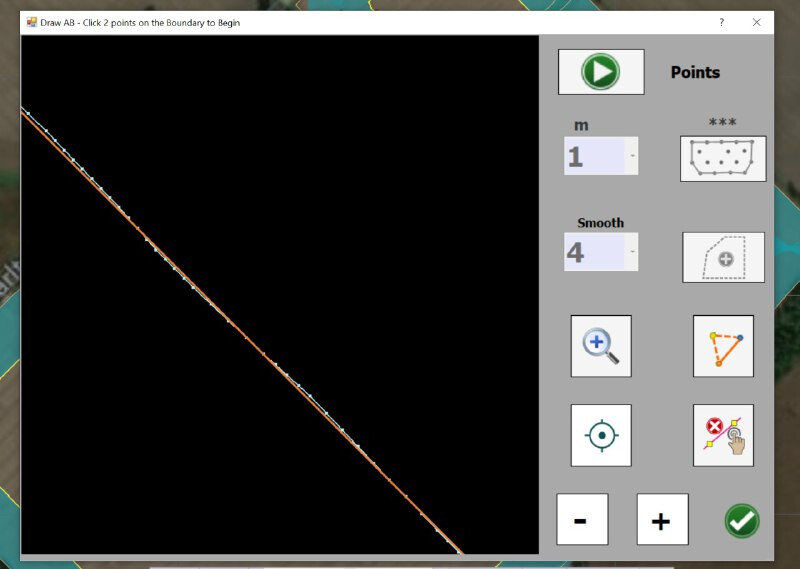
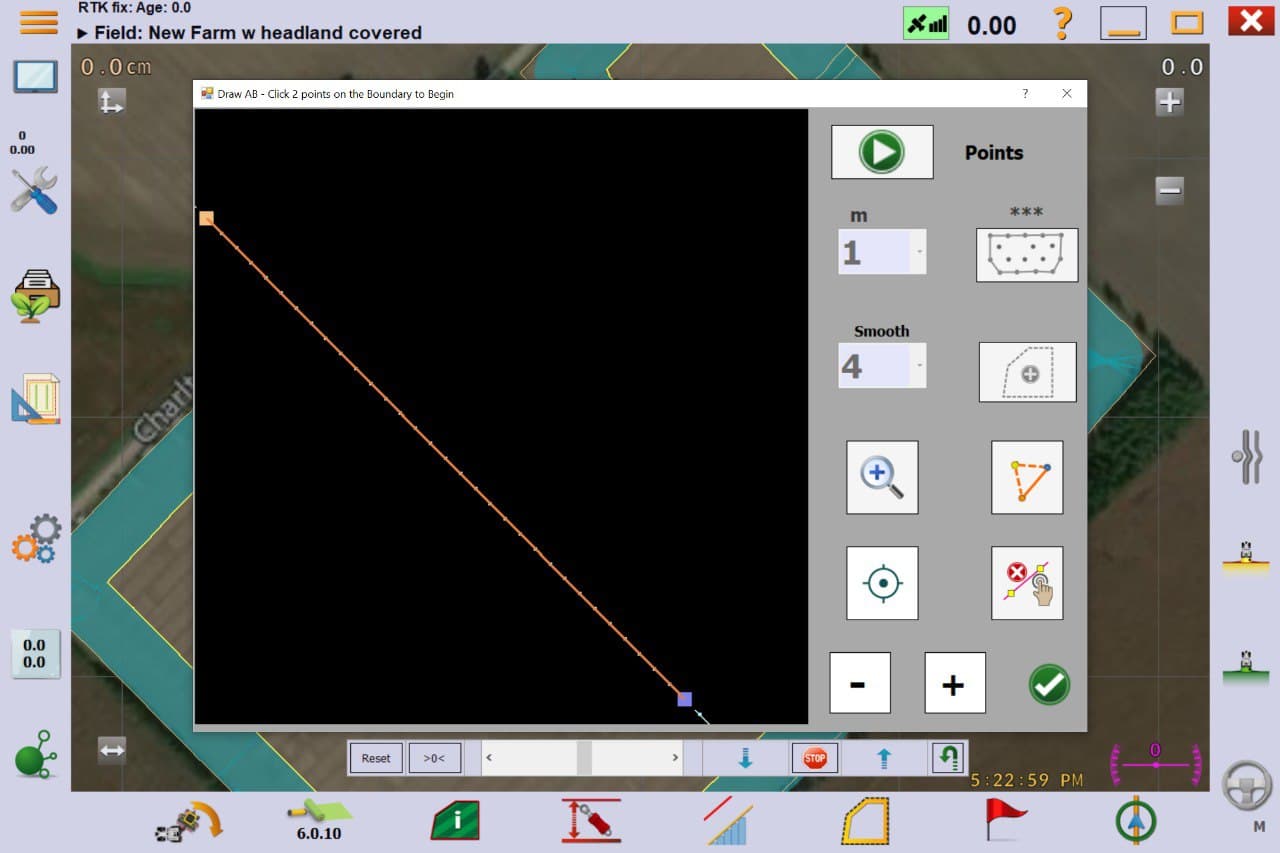
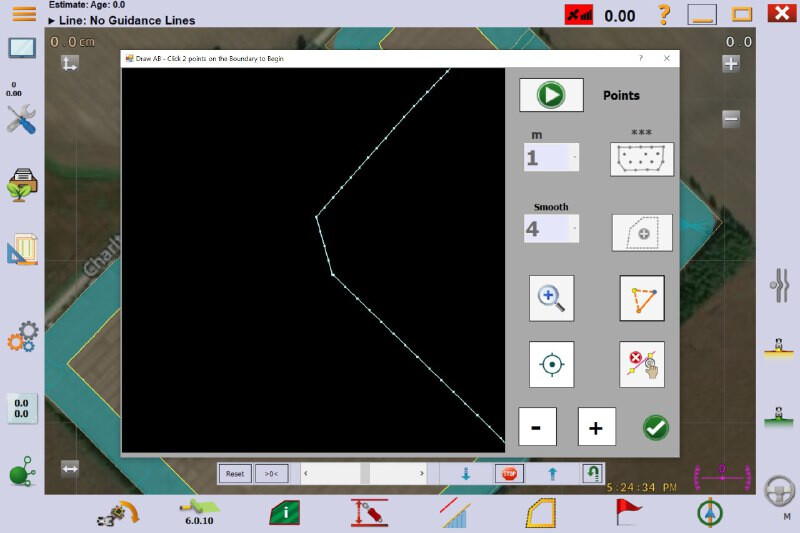
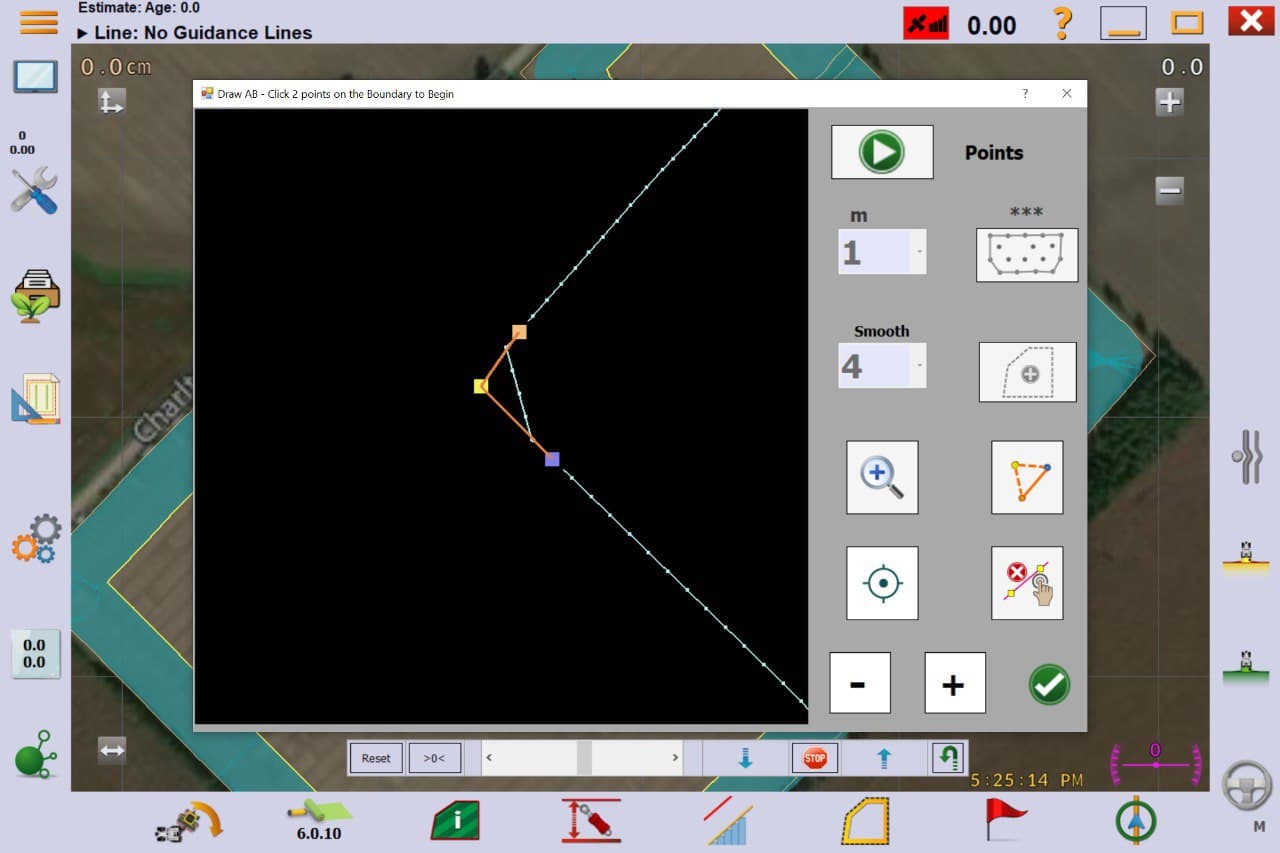
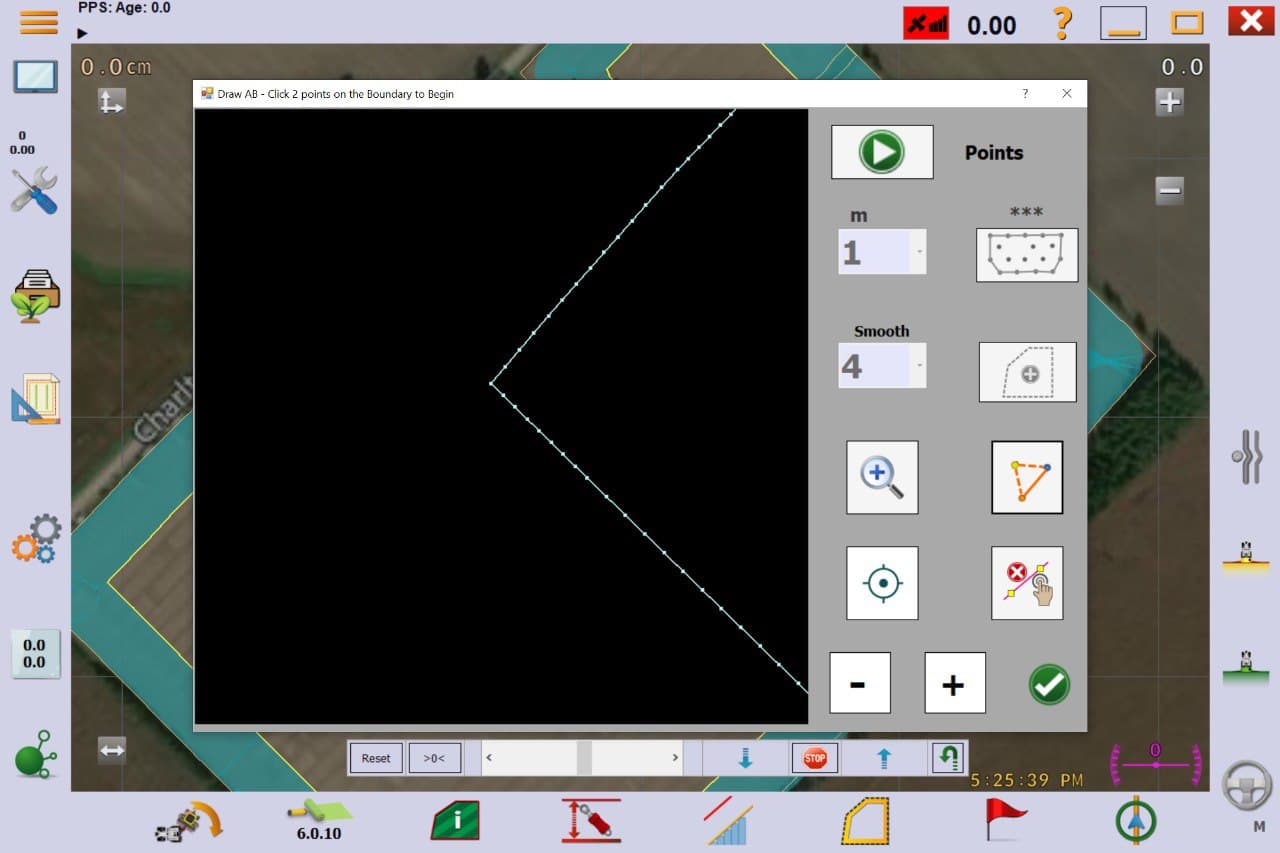
AOG uses whatever position quality you give it. You cannot specify “RTK Fix only” in AOG for boundary creation. You can however post-process your boundary in AOG and delete points, straighten out edges, sharpen corners, etc.
Switching between fix and float can cause big jumps or can be barely noticeable. I almost put my tractor in the ditch the first time I lost fix, it was my first tractor, with an autosteer valve (steers quick), and I was playing with the tuning values at low speeds on the road. Now I set everything to disable autosteer when fix is lost.
1 Like
where is this application of points available in V6… ?Very interesting!
It’s under tools → Boundary Tool