AgOpenGPS
Combining Single Antenna GPS + IMU
Hardware
Antenna Placement and steering algorithm
Bada
21 February 2022 15:57
88
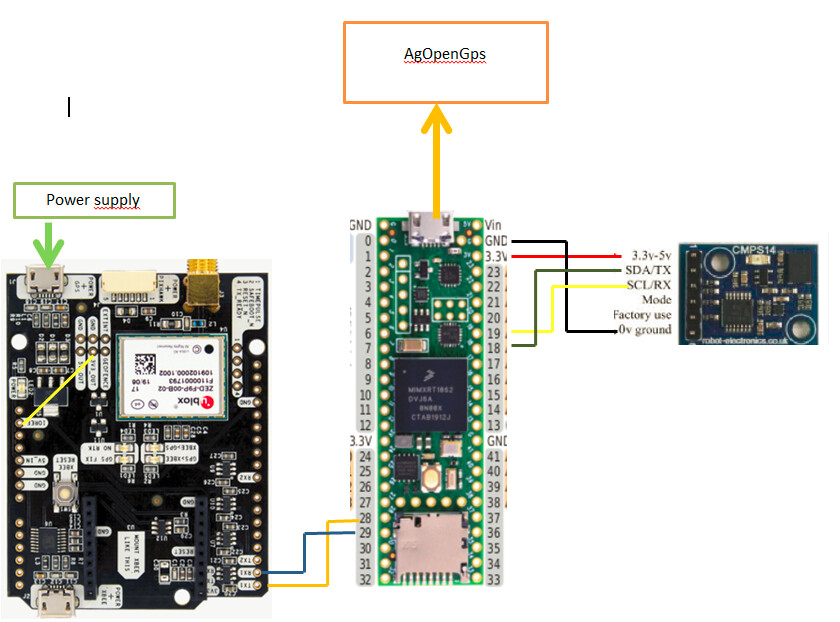
i try to test the GPS + imu fusion. Would be this the correct wiring?
grafik
840×622 124 KB
1 Like
AOG on Autosteer ready New Holland T6-175 year 2018
show post in topic