Bonjour,
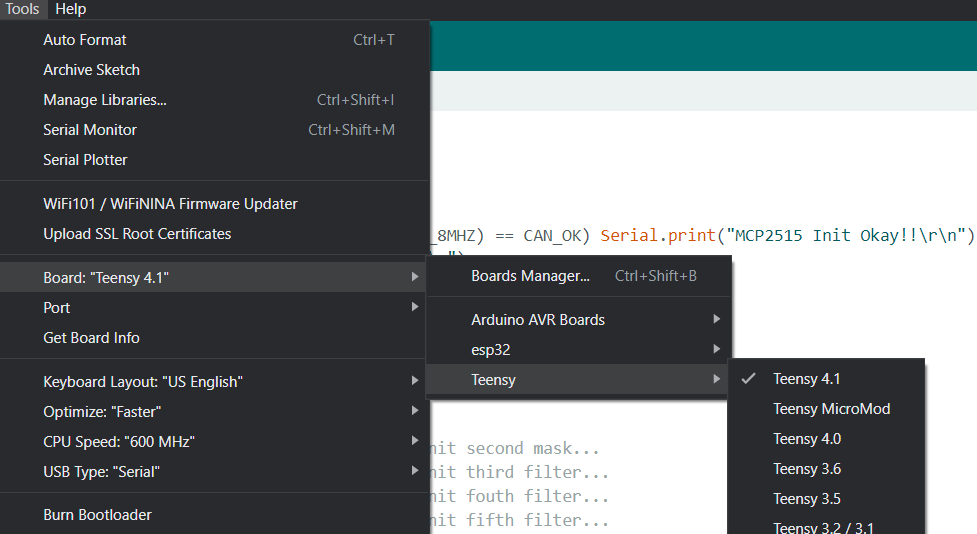
Il s’agit de ma première installation d’AG OPEN GPS et je rencontre un soucis avec le déversement du programme sur l’arduino, ci joint le message d’erreur.
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:33:30: error: ‘Serial7’ was not declared in this scope
HardwareSerial* SerialGPS = &Serial7; //Main postion receiver (GGA) (Serial2 must be used here with T4.0 / Basic Panda boards - Should auto swap)
^~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:33:30: note: suggested alternative: ‘Serial’
HardwareSerial* SerialGPS = &Serial7; //Main postion receiver (GGA) (Serial2 must be used here with T4.0 / Basic Panda boards - Should auto swap)
^~~~~~~
Serial
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:34:31: error: ‘Serial2’ was not declared in this scope
HardwareSerial* SerialGPS2 = &Serial2; //Dual heading receiver
^~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:34:31: note: suggested alternative: ‘Serial’
HardwareSerial* SerialGPS2 = &Serial2; //Dual heading receiver
^~~~~~~
Serial
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp: In constructor ‘ADS1115_lite::ADS1115_lite(uint8_t)’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:18:3: error: ‘Wire1’ was not declared in this scope
Wire1.begin();
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:18:3: note: suggested alternative: ‘Wire’
Wire1.begin();
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp: In member function ‘bool ADS1115_lite::testConnection()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:31:3: error: ‘Wire1’ was not declared in this scope
Wire1.beginTransmission(_i2cAddress);
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:31:3: note: suggested alternative: ‘Wire’
Wire1.beginTransmission(_i2cAddress);
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp: In member function ‘void ADS1115_lite::triggerConversion()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:114:3: error: ‘Wire1’ was not declared in this scope
Wire1.beginTransmission(_i2cAddress);
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:114:3: note: suggested alternative: ‘Wire’
Wire1.beginTransmission(_i2cAddress);
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp: In member function ‘int16_t ADS1115_lite::getConversion()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:131:3: error: ‘Wire1’ was not declared in this scope
Wire1.beginTransmission(_i2cAddress); //Sets the Address of the ADS1115.
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:131:3: note: suggested alternative: ‘Wire’
Wire1.beginTransmission(_i2cAddress); //Sets the Address of the ADS1115.
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp: In member function ‘bool ADS1115_lite::isConversionDone()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:146:3: error: ‘Wire1’ was not declared in this scope
Wire1.beginTransmission(_i2cAddress); //Sets the Address of the ADS1115.
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zADS1115.cpp:146:3: note: suggested alternative: ‘Wire’
Wire1.beginTransmission(_i2cAddress); //Sets the Address of the ADS1115.
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino: In function ‘void setup()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:190:14: error: ‘class HardwareSerial’ has no member named ‘addMemoryForRead’
SerialGPS->addMemoryForRead(GPSrxbuffer, serial_buffer_size);
^~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:191:14: error: ‘class HardwareSerial’ has no member named ‘addMemoryForWrite’; did you mean ‘availableForWrite’?
SerialGPS->addMemoryForWrite(GPStxbuffer, serial_buffer_size);
^~~~~~~~~~~~~~~~~
availableForWrite
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:31:19: error: ‘Serial3’ was not declared in this scope
#define SerialRTK Serial3
^
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:194:3: note: in expansion of macro ‘SerialRTK’
SerialRTK.begin(baudRTK);
^~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:31:19: note: suggested alternative: ‘Serial’
#define SerialRTK Serial3
^
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:194:3: note: in expansion of macro ‘SerialRTK’
SerialRTK.begin(baudRTK);
^~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:199:15: error: ‘class HardwareSerial’ has no member named ‘addMemoryForRead’
SerialGPS2->addMemoryForRead(GPS2rxbuffer, serial_buffer_size);
^~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:200:15: error: ‘class HardwareSerial’ has no member named ‘addMemoryForWrite’; did you mean ‘availableForWrite’?
SerialGPS2->addMemoryForWrite(GPS2txbuffer, serial_buffer_size);
^~~~~~~~~~~~~~~~~
availableForWrite
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino: In function ‘void loop()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:303:9: error: ‘systick_millis_count’ was not declared in this scope
if (systick_millis_count - PortSwapTime >= 10000)
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:345:22: error: ‘Serial7’ was not declared in this scope
SerialGPS = &Serial7;
^~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:345:22: note: suggested alternative: ‘Serial’
SerialGPS = &Serial7;
^~~~~~~
Serial
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:346:23: error: ‘Serial2’ was not declared in this scope
SerialGPS2 = &Serial2;
^~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:346:23: note: suggested alternative: ‘Serial’
SerialGPS2 = &Serial2;
^~~~~~~
Serial
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:31:19: error: ‘Serial3’ was not declared in this scope
#define SerialRTK Serial3
^
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:390:7: note: in expansion of macro ‘SerialRTK’
if (SerialRTK.available())
^~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:31:19: note: suggested alternative: ‘Serial’
#define SerialRTK Serial3
^
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:390:7: note: in expansion of macro ‘SerialRTK’
if (SerialRTK.available())
^~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer_gps_teensy_v5_5.ino:450:20: error: ‘systick_millis_count’ was not declared in this scope
gpsCurrentTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino: In function ‘void autosteerSetup()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:187:5: error: ‘analogWriteFrequency’ was not declared in this scope
analogWriteFrequency(PWM1_LPWM, 490);
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:187:5: note: suggested alternative: ‘analogWrite’
analogWriteFrequency(PWM1_LPWM, 490);
^~~~~~~~~~~~~~~~~~~~
analogWrite
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:192:5: error: ‘analogWriteFrequency’ was not declared in this scope
analogWriteFrequency(PWM1_LPWM, 122);
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:192:5: note: suggested alternative: ‘analogWrite’
analogWriteFrequency(PWM1_LPWM, 122);
^~~~~~~~~~~~~~~~~~~~
analogWrite
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:197:5: error: ‘analogWriteFrequency’ was not declared in this scope
analogWriteFrequency(PWM1_LPWM, 3921);
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:197:5: note: suggested alternative: ‘analogWrite’
analogWriteFrequency(PWM1_LPWM, 3921);
^~~~~~~~~~~~~~~~~~~~
analogWrite
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:208:3: error: ‘Wire1’ was not declared in this scope
Wire1.begin();
^~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:208:3: note: suggested alternative: ‘Wire’
Wire1.begin();
^~~~~
Wire
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino: In function ‘void autosteerLoop()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\Autosteer.ino:266:17: error: ‘systick_millis_count’ was not declared in this scope
currentTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zGyro.ino: In function ‘void GyroHandler(uint32_t)’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zGyro.ino:40:18: error: ‘systick_millis_count’ was not declared in this scope
lastGyroTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino: In function ‘void GGA_Handler()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:99:24: error: ‘systick_millis_count’ was not declared in this scope
gpsReadyTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino: In function ‘void VTG_Handler()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:133:24: error: ‘systick_millis_count’ was not declared in this scope
gpsReadyTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino: In function ‘void BuildNmea()’:
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:305:14: error: ‘systick_millis_count’ was not declared in this scope
lastTime = systick_millis_count;
^~~~~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:316:5: error: ‘Eth_udpPAOGI’ was not declared in this scope
Eth_udpPAOGI.beginPacket(Eth_ipDestination, portDestination);
^~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:316:30: error: ‘Eth_ipDestination’ was not declared in this scope
Eth_udpPAOGI.beginPacket(Eth_ipDestination, portDestination);
^~~~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:316:30: note: suggested alternative: ‘ipDestination’
Eth_udpPAOGI.beginPacket(Eth_ipDestination, portDestination);
^~~~~~~~~~~~~~~~~
ipDestination
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:316:49: error: ‘portDestination’ was not declared in this scope
Eth_udpPAOGI.beginPacket(Eth_ipDestination, portDestination);
^~~~~~~~~~~~~~~
C:\Users\pdiar\OneDrive\Documents\Arduino\Autosteer_gps_teensy_v5_5\zHandlers.ino:316:49: note: suggested alternative: ‘ipDestination’
Eth_udpPAOGI.beginPacket(Eth_ipDestination, portDestination);
^~~~~~~~~~~~~~~
ipDestination
exit status 1
Compilation error: ‘Serial7’ was not declared in this scope
une petite explication pour résoudre le problème serait la bien venue.
Merci par avance,