By No you say an esp32 can not do autosteer? Or what do you mean by " more than teensy". I would like to know the positive results of shifting. Could you explain that in plain words so “we standard users” can get some knowledge of benefits and cons.
2 Likes
If everything is so bad, why don’t you start a new project and stop messing around here?
2 Likes
The only thing with the esp32 is the very noisy A/D convertor. But everyone has different tolerance to what is good enough steering control. if using CAN for steering sensor position, then that eliminates the problem as well.
1 Like
Because it’s easier to help you improve this initiative. The main problem is the board on. The windows program does a great job and has less problems. And yes, I started a new board project, which I hope you will learn from.
Surely yes, in the meantime provide data, instead of just unreasonably criticizing the work of others.
It would be very easy for me to just say that your work is shit, without saying why, but it’s not my style, and even less boast that I am going to teach something to those who have been carrying this forward for years.
As I said, watch how you say things, if you contribute you are welcome, if you only come here to troll the way out is close.
2 Likes
This project has no intention on replacing anything, it is just an attempt to open new ways of working.
If everything works as expected, this weekend I may have gathered the data for the test of internal reader Vs ads1115. From there the HW would be defined almost definitively (at least for this version).
The goal for this version is to have the esp32 (wt32-eth01) running a aio PCB in the same fashion as the teensy 4.1 does in the current v4.2 all-in-one PCB.
To clarify to everyone, this project’s only intention is to built from what previous colleagues have done. I have various vehicles working with different versions of all-in-one PCBs and I am truly happy with them, obviously as engineer I can not stop thinking about how to be more efficient, do more or cheaper… And this is a way of trying those things. Fingers crossed to achieve as much as possible.
7 Likes
I shared all my work. And I don’t understand why it hurts you if I say it can be done better and cheaper? Do you see MCB’s work? It is a very well-executed transparent line of code. Teensy’s code has been the same for 2-3 years. There is no development on it, and there are many possibilities for refinement. Also, why is there only 1 thread running on a multi-core processor? And I’m done with that… The people decide.
1 Like
I’m really glad you are doing this. This is how things improve and inspire new ideas.
Looking forward to the end product!!
1 Like
I think @Vili is saying it but you only read “i can say your work is shit”. Change your tone and ppl will except it and as its open source you can do what ever you want. But as i read your posts here and on telegram it sounds to me your a bit hars to all the people who started this and did a lot of good work in making this happen.
If your work is better then eventualy people might switch to your idea. But like you said teensy code has not been change for years. Maybe there is a reason for it? And maybe its just waiting for someone like you to show up and say, hey i can do this better.
I bet your a awsome coder… but might wanna work on your human skills.
Cheers mate.
1 Like
@MrPoke I think the reason you are constantly met with criticism is due to your poor conduct. You come on here and literally have told the dev team they don’t know what they are doing. Got upset when they refused to merge your system breaking code. And have repeatedly insulted multiple members of the community. You are more than welcome to contribute if you are professional and respectful to the community much like how @MCB acts. But if you come on here(with almost zero understanding/experience with AOG) and insult those who have worked for years on this project, don’t expect to be met with praise. I think it should be pretty obvious how to properly treat people in an open source community but apparently to some it is not.
I never insulted anyone. I described what should be changed. And I won’t change my manners. I don’t care about people’s feelings here.
I have followed the development of AGOpenGPS from the very beginning. I know all the codes point by point. Don’t be surprised if incompetent people who have no idea about programming or microelectronics sign up.
I really liked it when it turned out to be a robotic steering wheel using a few more wires and an Arduino. I see that they have settled on Brain and are exploiting it. And it took him in a wrong direction.
Those were the good times, I mourn this:

Last warning, either you comply with the forum rules or we will show you the door
3 Likes
I look forward to hearing exactly what is wrong with the code. Last time i checked the round trip delays, it was about 4.2 msec. Most of that time is spent redirecting in the external router and windows.
Please explain in detail in a new thread where you see the deficiency, and from that, constructive discussion can happen.
1 Like
Sorry @MrPoke , but then do not call other people “names” . I asked for explanation above, but you did not give that. I have looked at your github, and did not find enough description there, so you could start there with a good description of how your system works together with the modules you use. I would like to use wifi without the risk of wrong packet/data order. (I use wifi in tractor now from a router to tablet, it work fine but are not sure if it is without data disorder.
3 Likes
Why not put teensy slot inside esp32 slot? Connect pins between them. So in AiO board you can chose what micro controller you want to use? If esp32 has deficiencies, that doesnt satisfy some requirements, use teensy istead.
For WAS ADC1115 is used with nano and teensy so why not with esp32 if it works now for autosteer.
Here is the first test, gathering data from n esp32 with the internal ADC1 (pin 35) and with ads115. programatically I hve applied a kalman filter to the input, just to evaluate it that could help.
the raw data:
putty-csv.txt (15.8 KB)
some graphs:
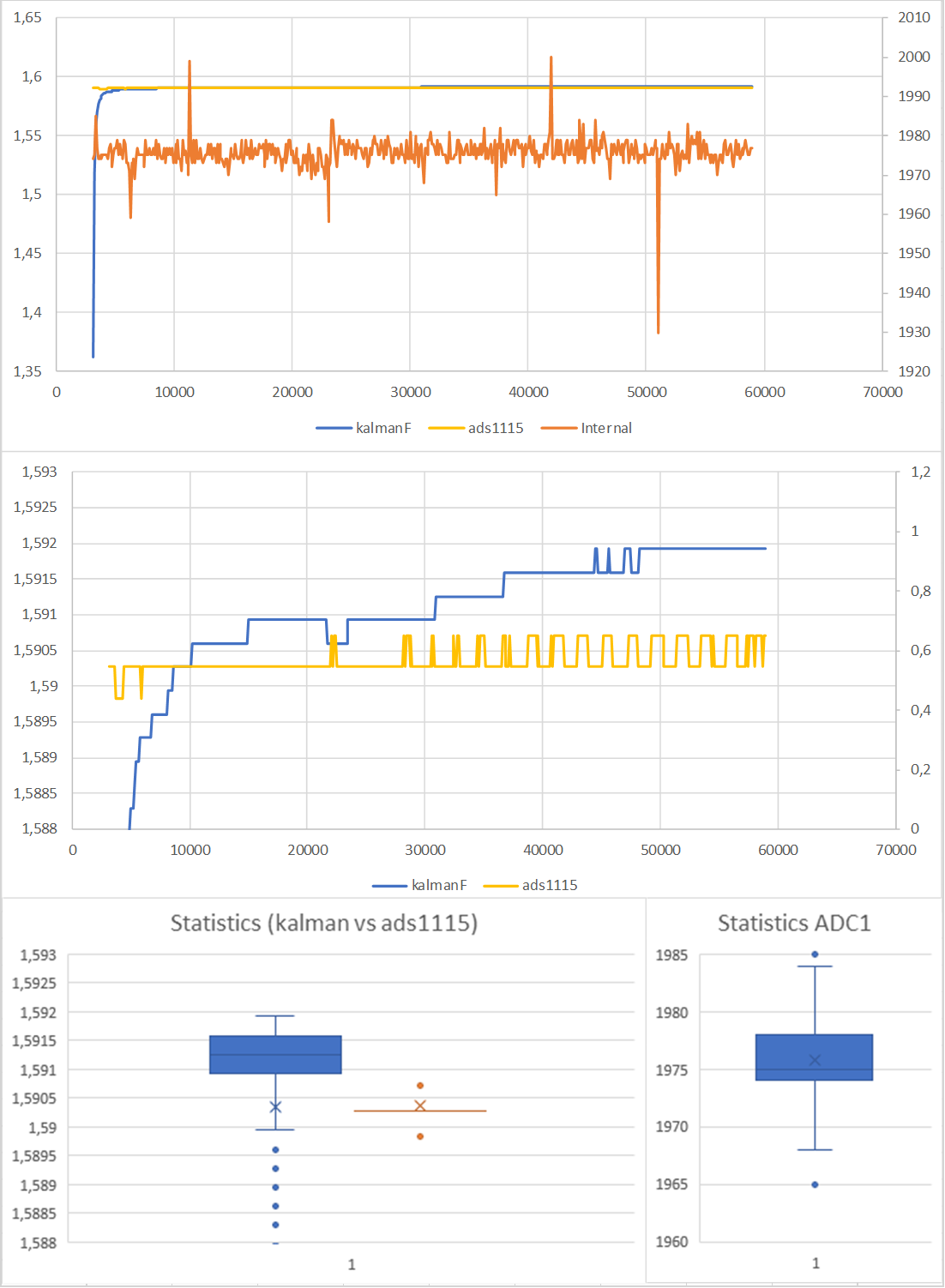
You applied the Kalman to adc1 or the ads input?
to de adc1. Kalman parameters 5, 5, 0.01
I don’t know much about Kalman filters but I find it hard to believe that the Kalman filtered adc1 numbers are the so close to the ADS, I would expect the filtered line to be through the middle (1.54) of the raw adc1.
I guess that if you do not believe or trust the numbers you could always do the test on your own, you have all the details about how it has been done. If you have any doubt just let me know.