The aim of this board is to apply the right amount of power/price and open the door to new connections (mainly wifi, Bluetooth). The software is aimed to be modular, taking advantage of OOP, and could be use in any other project -ACE or alike….
With teensy boards we have a huge amount of raw power, more that what we would never use in the current AOG architecture, that means that we invest more resources (money and usually time in my case in Europe) to get such powerful micro, T41 also has its limitations, like wifi or Bluetooth, soldering ethernet pins…
The project is in testing stage, waiting for parts.
Any comment or suggestion is more than welcome.
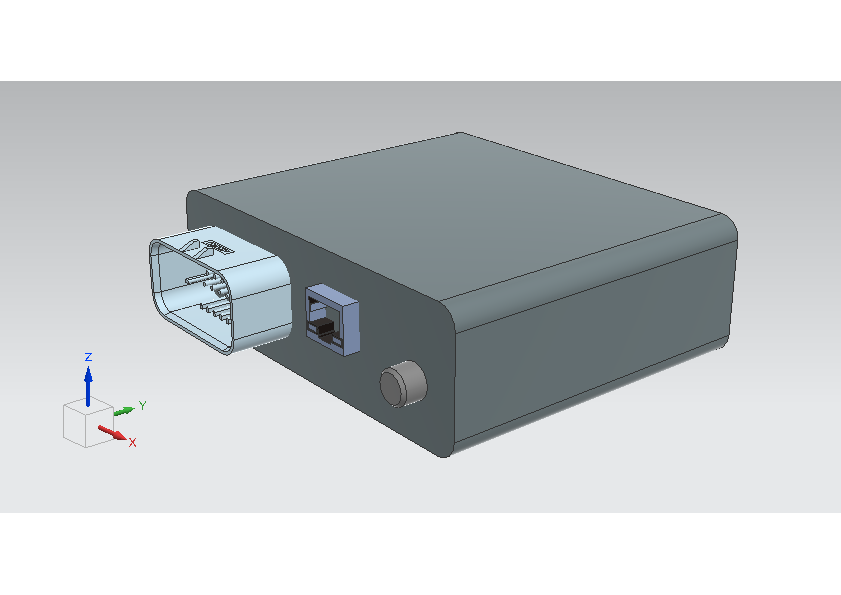
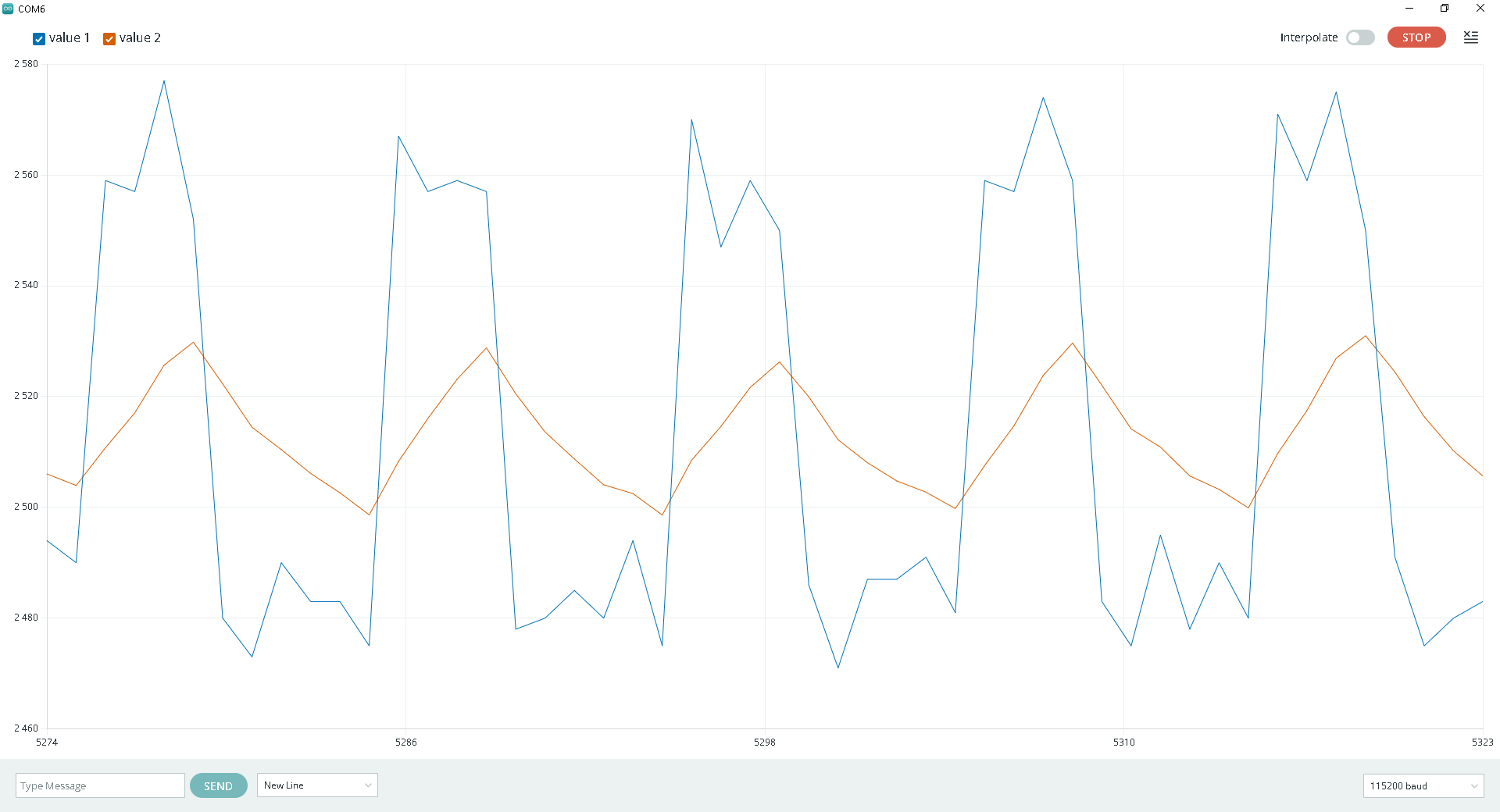
Here some pictures: